아두이노기반 암반사면의 절리방향측정 시스템 개발
Development of Joint Orientation Survey System Based on Arduino in Rock Slope
Article information
Abstract
암반사면을 안전하고 효과적으로 해석하기 위해서 암반의 역학적 특성을 면밀하게 조사해야 한다. 하지만 클리노미터를 사용한 절리조사의 한계점으로 인해 이를 보완한 새로운 측정법의 연구가 필요하다. 본 연구에서는 절리방향의 기하학적 특성을 분석하기 위해 절리의 방향성을 현장에 효율적으로 적용할 수 있는 절리조사 시스템을 개발하였다. 개발된 시스템은 하드웨어와 해석 소프트웨어로 구분된다. 하드웨어는 암반 절리 방향성을 측정하는 측정모듈, 측정자료를 전송하는 전송모듈로 구성되었다. 소프트웨어는 측정모듈을 통해 얻은 자료로부터 절리의 방향성을 분석하기 위해 개발하였으며 Arduino Joint Orientation Survey System로 명명하였다. 개발된 시스템을 접근이 어려운 지역 등 조사자가 측정할 수 없는 경우의 현장적용성이 뛰어나며 실내시험결과인 절리의 방향성을 효과적으로 분석할 수 있었다.
Trans Abstract
Mechanical Properties of rock to Rock Slope as a safe and effective interpretation should be thoroughly investigated. Clinometer, however, new complements this new measurement due to the restrictions of the research for the joint is needed. In this study, geometric characteristics of the joint orientation to analyze the joint orientation of efficiently developing a joint survey system that can be applied to the field. The system is developed and Analysis software to hardware. Hardware is bedrock to measure the joint orientation of measuring module, measuring the transfer of data transfer module. From the software is measuring module from the data to analyze the orientation of the joint development, and arduino joint orientation survey system named. Can not be measured by the investigation, including regional development approach is a system that has been difficult if the Field Application of the lab test results of the joint orientation and effectively.
1. 서론
일반적으로 지표에 노출된 암반해석은 절리방향 특성조사, 절리면의 역학적 특성시험, 절리방향 및 역학적 특성을 고려한 안정해석으로 분류된다. 이는 암반의 안정성이 절리의 방향성 및 그 역학적 특성과 관련이 크기 때문이다. 즉, 암반의 공학적 안정성은 절리 방향성과 역학적인 특성에 대한 자료를 정량적으로 분석하는 것이 중요하다.
이러한 암반 절리구조의 기하학적 특성은 조사선 조사, 조사창 조사, 클리노미터에 의한 조사 등과 같이 암반 표면에 접촉하여 절리조사를 수행한 후 통계분석을 거쳐 도출해왔다(Son et al., 2014). 하지만 현장 측정 과정은 수작업에 의해 진행되므로 측정 작업의 효율성이 떨어지는 문제점이 있었다(Priest, 1993; Kim and Kim, 2008). 또한 사진측량기법 및 레이저 스캐너 방식 등을 이용한 원거리 조사기법들에 대한 활용은 증대되고 있으나, 특정 지역에서의 고정식 방법이 대부분을 차지하고 있기 때문에 대규모 암반의 증가에 따른 절리구조 분석의 효율성 저하와 분석자의 주관적인 판단에서 기인하는 오류 및 낮은 조사 빈도로 인한 자료의 부족으로 암반의 안정성 확보 면에서 문제가 대두되고 있다(Moffitt and Mikhail, 1980; Hagan, 1980; Ryu et al., 2000).
이러한 제약 조건들을 해소하기 위하여 본 연구에서는 절리방향 분석에 대한 기존 이론을 효과적으로 절리조사에 적용하기 위해 절리조사 시스템을 개발하고자 하였다. 절리방향 조사시스템은 하드웨어와 해석 소프트웨어로 구분된다. 하드웨어는 암반 절리구조의 방향성을 측정하기 위하여 아두이노 우노, 절리방향 측정모듈, 측정자료의 무선송신모듈로 구성하였다. 해석 소프트웨어는 절리방향 측정모듈로 얻어진 자료를 화면상으로 출력하여 절리의 방향성을 분석하기 위해 개발하였으며 Arduino Joint Survey로 명명하였다.
본 연구의 목적은 암반사면을 안전하고 효과적으로 해석하기 위해서 암반의 역학적 특성인 절리방향을 측정하는 절리조사 시스템을 개발하는 것이며 연구방법은 절리방향을 측정하는 측정모듈과 측정자료를 전송하는 전송모듈로 구성하여 비접촉방식으로 절리방향을 측정하여 기존의 측정방법인 클리노미터를 이용한 방법과 실내시험으로 비교 검증하였다.
2. 절리조사 시스템의 이론적 배경
공학적 안정성의 평가를 위한 암반사면의 측정은 단층, 절리와 같은 불연속면을 대상으로 수행하게 되며, 이러한 불연속면의 속성을 토대로 사면의 안정성 분석을 수행하여 사면의 가능한 파괴 양상에 대한 정보를 취득할 수 있다(Lee, 2016). 암반사면의 조사에서는 특히 불연속면의 경사각과 경사방향은 사면 붕괴시 붕괴의 형태와 방향을 결정하는 중요한 요소이다(Wyllie and Mah, 2004).
암반사면의 측정에는 컴퍼스 클리노미터(compass clinometer, geological compass, clino-compass, inclinometer with compass 등)를 사용한다. 이 장비는 통상적으로 정사각형 혹은 직사각형의 모양을 가지며, 본체에 나침반이 포함되어 있어 측정대상 절리구조에 특정 모서리를 밀착하여 대상 구조의 방향각을 측정할 수 있다. 경사각의 측정은 힌지 등에 포함된 각도계나 중력 방향으로 기울어지는 보조 지침을 이용하여 수행 가능하며, 두 측정을 동시에 수행하거나 정확한 측정을 위해 각 측정을 별도로 수행할 수 있다(Wyllie and Mah, 2004). 경사방향은 수평면에서 측정되어야 하므로 측정대상 절리면에 밀착한 상태에서 장비를 수평으로 조정하는 과정이 필요하며, 이를 위해서 기포 수준기(air bubble level)가 설치되어 있는 경우가 많다. 각도의 측정은 나침반 등의 지침이 안정된 후 수행하며, 절리구조의 형태에 따라 값을 읽는 방법이 상이하고, 구조의 위치상 값을 읽기 곤란한 경우도 존재하므로 측정자에게는 어느 정도의 숙련 과정이 요구된다.
면구조의 경사각은 Fig. 1과 같이 기기의 Z축과 중력가속도 벡터 G의 사잇각과 같고 기기의 좌표체계 상에서 기기의 반대 방향 단위법선 벡터를 N (0, 0, -1)이라 하고, 센서 자료로부터 얻은 중력가속도 벡터를 G (Gx, Gy, Gz)라고 할 때, 경사 방향은 주향으로부터 계산하는 것이 편리한데, 이는 Fig. 1에서 나타난 바와 같이 G와 N의 외적 T가 사면의 경사방향에서 반시계 방향을 지시하는 벡터, 즉 사면의 주향을 나타내는 벡터와 같기 때문이다(Lee, 2016). 또한 지자기장의 복각(magnetic dip)이 지역에 따라 다르므로(Finlay et al., 2010), 수평면 상에서의 기준 방향은 G×M을 통해 항상 수평면상에 위치하며 방향각를 가리키는 벡터 E를 얻음으로써 최소한의 계산으로 주향의 방향 α를 계산할 수 있다.
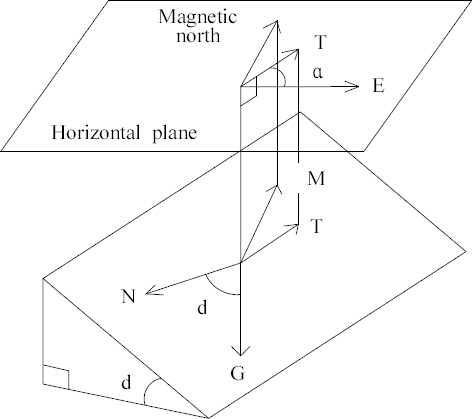
Structure Diagram Showing Major Components Required for Calculating Orientations of Devices
이때 α는 방향각
다음으로 D와 G의 내각 β에 의해 경사 방향의 제 1, 2사분면과 제 3, 4분면간 구분이 가능하다(Lee, 2016).
앞서 계산한 α는 부호에 의해 주향의 제 1, 2사분면과 제 3, 4사분면간의 구분이 이루어지며 주향의 크기는 경사방향보다 항상
3. 절리조사 시스템의 하드웨어와 소프트웨어
3.1 절리조사 시스템의 구성 및 원리
본 연구에서는 SmartProjects 社에서 개발한 sketch를 이용하여 자료 취득 및 분석을 실시하였다. 이 시스템은 크게 Arduino Uno, Sensor modules, Xbee module으로 구성되어 있다. Fig. 2는 절리조사 시스템의 구성도를 나타낸다.
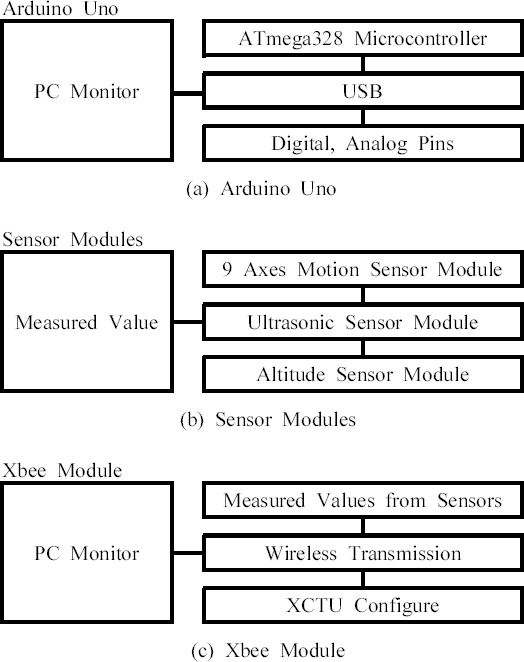
Conceptual Diagram of the Joint Survey System
3.2 Arduino Uno
아두이노 우노는 Atmel 사의 16MHz 마이크로컨트롤러인 ATmega328을 사용하며 총 20개의 입출력 핀을 통해 다양한 주변 장치를 연결할 수 있으며 연결을 위해 핀 헤더를 제공하고 있다. 다운로드 할 수 있는 프로그램의 최대 크기는 32 KByte이지만 아두이노의 특징 중 하나인 부트로더가 그 중 일부를 사용하므로 실제로는 부트로더 크기를 뺀 나머지를 프로그램을 위해 사용할 수 있다. 이외에도 프로그램 실행 중 데이터 저장을 위한 2 KByte 크기의 SRAM과 전원이 꺼진 이후에도 데이터가 보존되는 1KByte 크기의 EEPROM을 사용할 수 있다. 본 연구에서는 아두이노 우노는 9축모션센서, 초음파거리센서, 고도센서로부터 입력받은 신호를 디지털신호로 변환하여 수신부 컴퓨터의 모니터상에 출력하는 역할을 한다. Table 1은 Arduino Uno에 대한 기술적 사양을 나타내고 있다.

Technical Specification (Arduino Uno)
3.3 9축 모션센서
Bosch 사의 BNO055 absolute orientation sensor를 기반으로 제작된 제품으로, BNO055는 3축 14비트 가속도계, 3축 16비트 자이로스코프(+/- 2000도/초당) 3축 지자계센서, 그리고 BSX3.0 FusionLib 소프트웨어가 실행되는 32비트 마이크로컨트롤러를 내장하고 있다. 센서는 오일러 각, 회전 벡터, 선형 가속도, 중력 벡터와 같은 신호를 제공한다. 본 연구에서 9축 모션센서의 측정값은 암반사면의 경사방향을 결정하는 데 활용된다. Table 2는 9 Axes Motion Shield에 대한 기술적 사양을 나타내고 있다.

Technical Specification (9 Axes Motion Shield)
3.4 초음파센서
초음파센서 모듈은 HC-SR04로서 측정거리가 4 m까지이며 측정정확도는 2 mm에 이른다. 초음파모듈은 송신부, 수신부, 조절회로로 구성된다. 모듈의 기본원리는 최소 10 μs의 시간신호로 입출력 트리거를 사용하며 자동적으로 약 40 kHz로 송신하고 펄스신호로 반송한다. 반송신호인 경우 입출력시간은 초음파의 송신에서 반송까지의 시간이다. 측정거리(L)은 Eq. (7)과 같다.
여기서, t는 도달시간, v는 음속을 나타낸다. 초음파센서는 온도에 대한 보상회로를 포함하고 있고 기압과 상대습도의 영향은 미미하므로 무시할 수 있다. 본 연구에서는 초음파센서를 이용하여 대상 암반사면과 측정기기와의 수평거리를 측정하였다. Table 3은 Ultrasonic Sensor에 대한 기술적 사양을 나타내고 있다.

Technical Specification (Ultrasonic Sensor)
3.5 고도센서
고도센서 모듈은 고정밀의 디지털 압력센서인 BMP180로서 초저전력, 저전압으로 최적화되어 장기간의 안정성 및 고정밀과 선형성을 갖고 전자기장의 강도에 대한 압전저항성에 기초를 두고 있다. 본 연구에서의 고도센서는 압력값을 고도(H)로 변환하여 적용하였으며 변환식은 다음 Eq. (8)와 같다.
Math
여기서 p는 측정된 압력, p0는 해수면에서 압력을 나타낸다.
상기 Eqs. (7)과 (8)을 통해서 경사각(d)는 다음 Eq. (9)와 같이 계산된다.
Table 4는 Altitude Sensor에 대한 기술적 사양을 나타내고 있다.

Technical Specification (Altitude Sensor)
3.6 지그비센서
근거리 무선방식에 근거한 통신 네트워크 모듈인 XBee는 일대일 통신과 스타형 토폴로지, 메쉬형 토폴로지로 대별된다. 본 연구에서 적용된 XBee모듈은 Zigbee 통신규약을 적용하였으며 토폴로지는 일대일 통신을 적용하였다. XBee S2 모듈에 대해서 지그비 통신의 주소, 접속, 제어 등을 처리하기 위한 여러 가지 구성 설정을 제공해주는 설정프로그램인 XCTU를 이용하여 일대일 통신을 구축하였다. 이와 같은 지그비 통신을 통해서 9축 모션센서, 초음파센서, 고도센서로부터 얻은 데이터를 수신부 컴퓨터에 무선으로 송신할 수 있다. Table 5는 Xbee Module에 대한 기술적 사양을 나타내고 있다.

Technical Specification (Xbee Module)
3.7 데이터 취득 소프트웨어
아두이노의 통합개발환경은 Java와 C를 기반으로 개발되는 크로스 플랫폼 응용 소프트웨어이며, 에디터와 컴파일과 업로드가 가능하고 아두이노 동작을 위해서 C++언어 기반을 사용한다(Simon M, 2011). 컴파일러는 AVR-GCC을 사용하며 아두이노 개발환경은 C++을 사용하여 원하는 동작을 하도록 코딩을 하고 이것을 보드에 업로드하면 아두이노가 동작한다. 아두이노 업로드는 플래시 메모리에 써지므로 다음부터는 전원만 인가하면 동작하며 이러한 아두이노 IDE를 통해 작성된 프로그램이나 코드를 Sketch라 부른다(Simon M, 2011). 본 연구에서 스케치를 이용하여 아두이노 우노와 센서를 통한 데이터를 수신부 컴퓨터에 출력하였다.
4. 실험실모형을 이용한 적용성 평가
이 연구에 적용된 절리조사 시스템을 현장에 활용하기에 앞서, 실내모형에 대해서 적용성을 평가하였다. 실내모형 시험에 사용된 대상은 Fig. 3과 같이 방향이 서로 다른 9개의 절리면으로 모사하였다. 각 절리면에는 표적을 미리 표시하여, 이를 통해 해당점의 좌표를 읽을 수 있다. 각 절리면에 대해서 경사각을 40°부터 10°씩 증가시켜 80°까지 측정하였으며 경사방향에 대해서는 0°부터 10°씩 증가시켜 90°까지 측정하였다. 경사각이 40°인 경우에 경사방향은 0°부터 90°까지 측정하는 방법으로 경사각이 80°가 되는 경우까지 조사하였다.

Joint Orientation Test Mode
실내모형 시험에서는 클리노미터를 이용한 측정결과와 절리조사 시스템을 통한 결과를 비교 검토 하였다. Fig. 4는 절리조사 시스템의 하드웨어 구성도를 나타낸다.
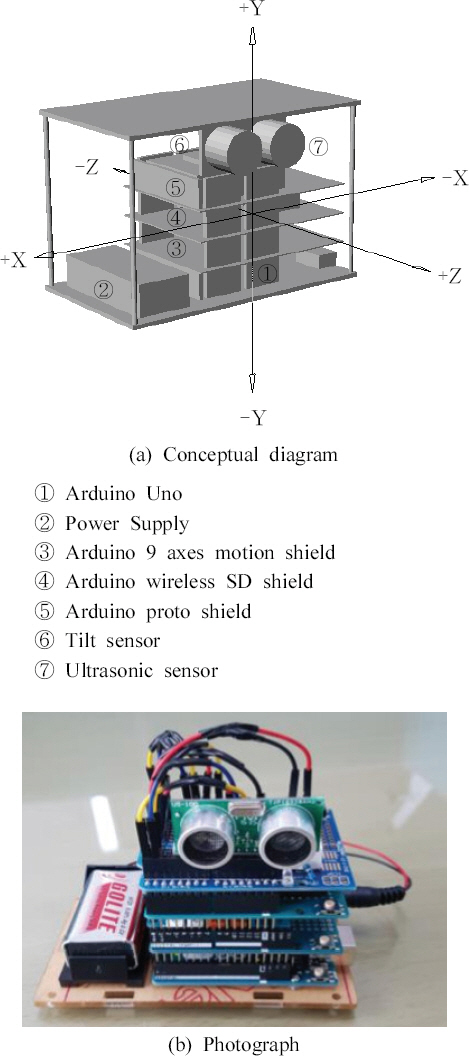
Joint Orientation Test Apparatus
4.1 절리조사 시스템을 이용한 절리 데이터의 결과
본 연구에서는 실내시험에서 얻은 데이터를 이용하여 절리면의 방향을 산정하였고, 실제 클리노미터를 이용하여 얻은 절리 데이터와 비교, 분석하였다.
4.2 절리 방향 데이터의 신뢰도 분석
50개의 절리를 선정하여 절리 방향을 직접 비교하고 신뢰도를 분석하였다. Ewan and West(1981)는 클리노미터의 조사자에 따른 경사와 경사방향의 측정 오차를 각각 ±5°와 ±10°라고 하였으며, 측정 장비는 ±1~2°의 기계 오차가 발생할 수 있다고 하였기 때문에 본 연구의 허용 오차범위를 경사는 ±7°, 경사방향은 ±12°로 설정하였다(Park et al., 2015). Table 6은 50개 절리의 경사/경사방향 측정결과를 비교한 것으로 50개 측정결과의 경사/경사방향에 대한 오차의 평균은 Table 6에서 나타난 것과 같이 경사의 평균 오차는 ±3.51°이고, 경사방향의 평균 오차는 ±5.42°로 분석되었다. 50개의 자료에서 이 연구에서 설정한 허용 오차범위를 초과하는 데이터는 없는 것으로 분석되었다.

Comparison of Each Joint Orientation (Clinometer and Arduino Measure System) (Unit: degree,°)
경사와 경사방향의 오차를 용이하게 확인하기 위해서 Fig. 5와 같이 그래프로 50개의 오차를 표현하였는데, 경사는 (+)값으로 표현하였으며, 경사방향은 (-)값으로 표현하였다. 경사의 오차 중 가장 큰 오차를 나타내는 절리는 30번 절리로 6.92°의 오차를 가지며, 경사 방향의 경우 27번 절리가 11.7°의 오차를 가지는 것으로 분석되었다. 경사/경사방향의 허용오차범위와 2개의 측정방법에 의한 오차의 편차는 30번 절리의 경우 6.92°이고, 27번의 경우 11.7°의 편차를 가지므로 경사/경사방향의 최대오차에 대한 편차는 경사방향이 더 큰 것으로 분석되었다. 오차들의 평균 편차를 산정하면, 경사의 평균 편차는 3.51°로 분석되었으며, 경사방향의 경우 5.42°로 산정되었는데 이를 통하여 경사보다 경사방향의 편차가 더 큰 것을 알 수 있다. 전체 50개의 자료 중에서 경사와 경사방향 모두 허용오차 범위 안에 들었다.
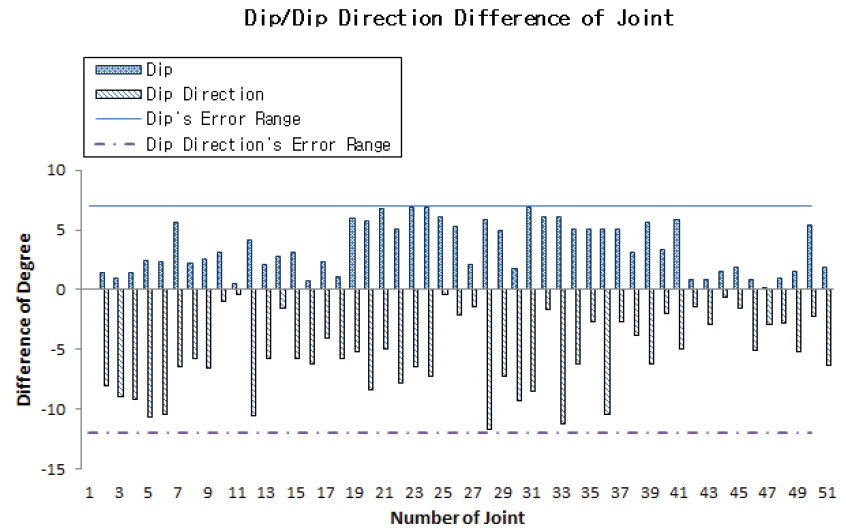
Graph of Total Joint Orientation Error
4.3 오차 원인 분석
50개의 절리결과를 비교⋅분석하기 위해 오차가 큰 절리를 이용해 오차의 원인을 분석하였다. 클리노미터와 Arduino Measure System을 이용한 절리의 방향을 비교시 최대오차의 발생요인은 절리면의 측정방법의 차이로 판단된다. 클리노미터를 이용하여 절리의 방향을 측정하는 경우에는 절리의 면적이 큰 경우에 비하여 실내에서 절리면을 모형화하여 측정하였기 때문에 측정 결과의 차이가 발생한 것으로 판단된다. 따라서 실내 모형시험에서 절리면에 대한 모사를 실제 절리면의 크기에 근사하게 제작하여 측정 하거나 절리를 다수의 지점에서 측정하여 평균값을 산정하면 오차를 줄일 수 있다고 판단된다.
Arduino Measure System을 사용하여 절리방향 데이터를 얻을 때 초음파센서의 굴절의 영향, 지자기센서의 자기장의 영향, 고도센서의 기압 및 온도의 영향으로 인한 데이터 오차를 최소화하고, 다수의 지점에서 측정을 하거나 다른 시기에 걸쳐 측정을 하는 경우에 절리방향 데이터의 오차를 감소시킬 수 있을 것으로 판단된다.
4.4 평사투영법에 의한 절리 방향 분석 결과
데이터 분석 프로그램을 통해서 모형 사면의 절리를 측정한 결과 총 50개의 절리가 측정되었으며, 절리의 방향에 따라서 다양한 절리가 모형 사면에 발달되어 있음을 알 수 있었다. Fig. 6은 50개의 절리 데이터를 평사투영망에 투영시킨 결과이다. 스테레오네트 상에서 확인한 결과 절리 이 분명하게 구분되는 것을 알 수 있었다. 클리노미터로 측정한 경우가 Arduino Measure System으로 측정한 경우보다 Pole Plot result 및 Contour Plot result에서 분포범위가 더 조밀한 것으로 나타났으며 측정데이터 분포범위의 차이는 클리노미터로 측정하는 경우보다 Arduino Measure System으로 측정하는 경우 초음파센서, 지자기센서 및 고도센서의 영향으로 인해서 발생된 것으로 추정된다. Rosette Diagram result에서는 절리의 빈도가 클리노미터로 측정한 경우보다 Arduino Measure System으로 측정한 것이 낮게 나타났으며 측정데이터 빈도의 차이는 클리노미터를 이용한 경우보다 Arduino Measure System을 이용하는 경우에 데이터측정이 자동화로 인해서 발생된 것으로 추정된다.
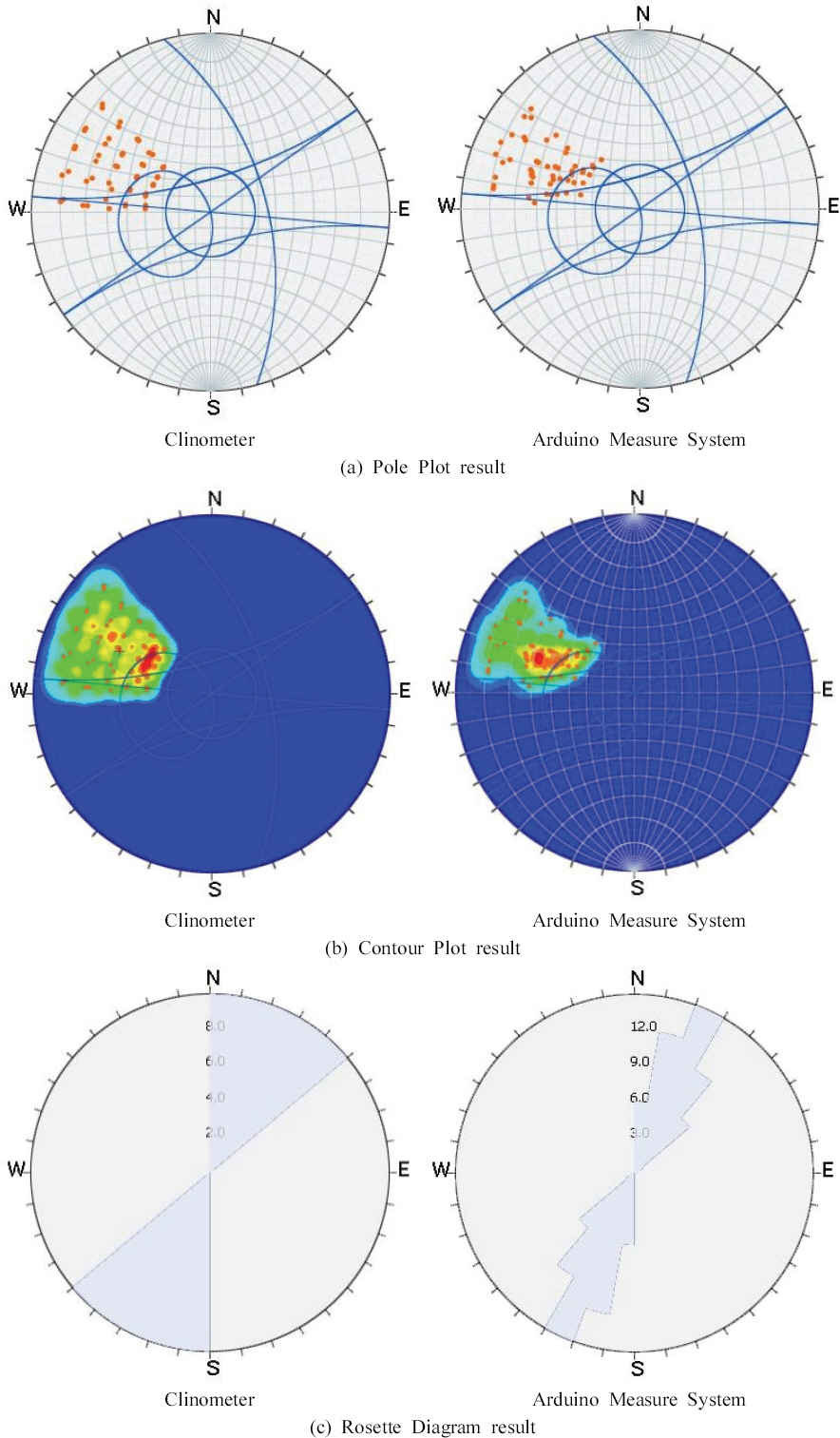
Joint Orientation Using the Streograhpic Projection Method
5. 결론
본 연구에서 기존 암반 절리 조사방법에 대한 한계점을 극복할 수 있는 개선된 조사법의 하나인 Arduino Measure System를 이용하여 절리의 방향성을 자동으로 측정하였으며, 직접 측정한 절리 방향 데이터 50개와의 비교를 통하여 Arduino Measure System를 활용한 절리 방향 측정의 신뢰성에 대한 실험을 수행하였다.
사물인터넷기반의 효과적인 현장 적용을 위해 본 연구를 통해 개발된 절리조사 시스템은 절리의 방향성에 대한 정량적 분석이 가능하며 하드웨어와 소프트웨어로 이루어진 통합시스템이다. 상기의 연구로부터 얻어진 결과는 다음과 같다.
연구대상 모형을 클리노미터로 직접 측정한 50개의 절리 방향 데이터와 Arduino Measure System를 통해 측정된 절리 방향 측정결과를 비교⋅분석한 결과 경사는 ±3°, 경사방향은 ±5° 내외의 편차가 발생하였고, 본 연구에서 정한 경사/경사방향의 허용오차범위인 ±7°, ±12°내에 있으므로 본 연구 결과는 신뢰할 수 있는 자료로 판단된다.
오차원인을 분석한 결과 절리의 측정방법의 차이로 인해 오차가 발생한 것으로 분석되었다. 특히, 클리노미터로 절리방향을 측정하는 방법의 차이에 따라 큰 영향을 받는 것을 알 수 있었다. 오차를 최소화하기 위해서 직접 측정하는 경우에는 절리면적에 비례하여 다수의 지점을 조사하여 절리 방향의 평균을 산출하거나, 면적이 큰 판을 이용하여 측정하는 방법을 적용하면 절리 방향의 오차를 줄일 수 있다. Arduino Measure System를 이용하여 절리 방향을 측정하는 경우에는 절리면에서의 굴절의 영향, 자기장의 영향, 기압 및 온도 등의 영향을 최소화해야 자료의 신뢰도를 높일 수 있다.
Arduino Measure System를 이용한 절리 측정법은 기존 절리 조사법의 단점인 접근성의 제약을 해결할 수 있고, 조사자의 안전성을 확보하여 조사의 효율성을 향상시켰다. 마지막으로 Arduino Measure System를 통해 측정된 자료는 데이터로 보존되기 때문에 암반사면 보강공사 후에도 조사된 자료로 체계적인 관리가 가능하고, 사면붕괴시 신속한 대안을 수립하는 자료로 활용할 수 있다. 이번 연구를 통해서 절리 방향 데이터에 대한 신뢰성을 높일 수 있었다.
본 연구의 결과는 절리의 방향성에 대한 특성조사의 기존이론을 활용하여 절리조사에 적용이 가능한 효율적인 하드웨어와 해석 소프트웨어를 개발하여 절리 측정 작업을 편리하게 하고, 절리구조에 대해 신뢰도가 높은 자료를 제공하며 향후 절리 암반의 안정해석에 필요한 입력 자료들을 제공하고 활용하는 데 기여할 수 있다고 본다.
감사의 글
본 연구는 국토교통과학기술진흥원에서 시행한 2016년도 국토교통기술촉진연구사업(연구과제번호 1615008745)의 지원으로 이루어졌으며, 이에 감사드립니다.