VRS-GPS 컨트롤러 시스템 개선을 통한 위치정밀도 분석
Analysis on the Position Accuracy through the Improvement of the VRS-GPS Controller System
Article information
Abstract
최근 다양한 산업분야에서 실시간으로 정밀한 위치정보에 대한 요구가 증가함에 따라 GNSS와 스마트장비를 이용한 이동측위에 대한 연구가 활발히 진행되고 있다. 본 논문은 VRS-GPS(Network-RTK) 장비의 컨트롤러 시스템을 Java Dephi C# 프로그램을 이용하여 개선하고 전용 앱(SGSA)을 개발하였다. 개발된 시스템은 데이터 분석의 처리속도와 효율성을 개선하였으며 운영체제의 사용자 편의환경(GUI, Graphic user interface)을 향상시켰다. 또한, 기존 GPS 장비와의 위치 정밀도 분석을 통해 개발된 시스템의 적용성을 평가하였다. 기존 GPS 장비의 L1, L2 그리고 SGSA를 이용하여 20개의 국가기준점 실험지점에 대한 위치정밀도 분석을 실시하였다. 그 결과, PDOP은 L1, L2, SGSA에 대하여 평균 1.0 ~ 2.0사이의 결과 값을 얻을 수 있었으며 위성의 기하학적 위치정밀도 배치가 충분히 신뢰할 수 있다고 판단된다. 그리고 H-RMSE의 경우 SGSA 측정값이 0.004 m ~ 0.006 m의 값이 도출되었고, V-RMSE는 0.007 m ~ 0.012 m의 결과 값이 제시되었다. 개발된 SGSA는 기존 GPS 장비의 정밀도보다 다소 낮은 결과 값이 제시되었지만 항공사진측량 및 공공측량 작업규정에 대하여 위치정밀도가 만족함을 알 수 있었고, 현장에서 충분히 기준점 및 응용측량으로 사용할 수 있을 것으로 판단된다.
Trans Abstract
As the requirement for accurate positional information in real-time is increasing recently in various industrial fields, there are studies conducted actively on the mobile positioning using GNSS and smart devices. In this study, the controller system of the VRS-GPS (Network-RTK) device was improved and exclusive APP (SGSA; Smart Gps Survey App) was developed to perform analysis on the position accuracy compared with the existing GPS devices. In addition, Java Delphi C# Program was used for improving the VRS-GPS controller system, and the developed system was able to enhance the processing speed, efficiency and user environment. L1, L2 and SGSA of the existing GPS device were used to perform position accuracy analysis on test points of 20 national control points. As a result, PDOP was able to obtain the result values on average between 1.0 ~ 2.0 on L1, L2 and SGSA, which is considered to be fully reliable on the geometric position accuracy arrangement of the satellite. In addition, in the case of the H-RMSE, the SGSA measurement values were derived to be 0.004 m ~ 0.006 m, and the V-RMSE showed 0.007 m ~ 0.012 m of result values. The developed SGSA showed relatively lower result values than the accuracy of existing GPS device, but certain parts were satisfied through the aerial photograph measurement and public surveying work standard, which is considered to be possible for use in the field as the standard point and application measurement.
1. 서 론
미 국방성에서 군사용으로 개발된 GPS (Global Positioning System)는 위치 정보와 관련되어 사실상의 표준으로 전 세계의 다양한 분야에서 활용되고 있다. 또한, GPS는 스마트장비를 통해 개인들에게 일상생활에 있어 다양한 서비스를 제공하는데 많이 활용되고 있다. 또한 GPS는 정밀측지용으로 국가 위치정보의 기반산업 구축의 핵심적인 장비로서 누구나 손쉽게 사용할 수 있는 장비로서 그 활용성을 넓혀가고 있다. 이러한 GPS는 과거 수신기, 컨트롤러, 거치대 등으로 구성되어 있는 고가의 측량 기기로 인식되었으나 최근 기술의 발달로 인한 기기의 성능향상 및 대량 생산으로 사용성이 보편화되고 있다.
스마트기기를 이용한 GPS 관련 연구동향을 살펴보면, 핀란드 지리정보연구소(FGI; Finnish Geospatial research Institute)의 Kirkko-Jakkola et al. (2014)의 연구팀은 퀼컴 통합 수신칩에서 GNSS (Global Navigation Satellite System) 원시 측정값을 획득 할 수 있도록 수정된 펌웨어를 장착한 마이크로소프트 모바일 폰으로 정확도를 높이는 연구를 수행하였다. 그리고 오스틴 텍사스 대학의 Pesyna et al. (2014) 연구팀은 스마트기기의 안테나를 사용하여 반송파위상을 측정하고 측정된 반송파를 이용한 측위 기술을 제안한 연구를 진행하였다. Shin et al. (2016)은 DGNSS-CP (Differential GNSS-Correction Projection)를 이용한 안드로이드 어플리케이션을 구현하고 필드테스트를 진행한 바 있으며, 스마트기기에서 자체 계산한 NMEA (the National Marine Electronics Association)의 위치좌표와 위성 배치 정보만을 이용하여 보정정보를 위치영역으로 투영하는 방법을 사용하여 정밀도를 분석하였다.
지금까지 개발된 고정밀 실시간 측위 기술은 측위 방법에 따라 단독 측위와 상대 측위로 구분한다. 단독 측위 방식으로 수cm~수십cm의 정확도로 실시간 이동체의 위치를 결정할 수 있는 기술은 코드 및 위상 관측치를 이용한 정밀단독측위가 있다. 하지만 시간의 제약으로 최종 정밀 궤도력 대신 초 신속 정밀 궤도력을 이용함에 따라 정확도가 떨어지는 단점이 있었다. 이러한 실시간 이동 측위 방식의 단점을 보완하기 위해 Gao, Y. and Chen, K. (2004)은 GPS 상시 관측소망으로부터 수신된 데이터를 이용하여 이동국 인근에 가상기준점(VRS; Virtual Reference System)을 생성하고, 계통오차를 계산한 후 보정 값을 이동국에 전송하여 상대 측위를 통해 정밀한 위치를 계산하는 Network-RTK (Real Time Kinematic, VRS-GPS) 방식을 연구하고 도입하게 되었다.
VRS-GPS 측량에 의한 위치정밀도 분석에 대한 연구를 살펴보면, Kim et al. (2014)는 Network-RTK 측량 정확도 평가를 위하여 Static GNSS 측량으로 지상기준점을 측정하고 좌표변환을 통한 평면위치좌표를 산출한 결과와의 비교분석을 수행하였다. 그리고 Han and Park (2014)은 VRS와 FKP (Flachen-Korrektur Parameter) 측량 기법으로 현황측량에 대한 신뢰성검증을 위하여 8점의 통합기준점에 대하여 다양한 방법으로 비교⋅분석한 바 있다. No et al. (2012)은 Network-RTK를 실시간 이동 측위에 적용하기 위해, MMS (Mobile Mapping System)을 이용하여 수 cm의 위치정확도 분석에 대한 연구를 진행하였다.
본 연구는 VRS-GPS의 컨트롤러 시스템을 스마트기기로의 전환하고 전용 앱을 개발하여 기존 GPS 장비와의 위치정밀도를 분석하여 활용성을 검증하고자 한다.
2. VRS-GPS 개선설계 및 적용
2.1 현황 및 문제점
VRS-GPS 기법은 종래의 RTK 기법이 거리에 따라 오차가 증가하는 문제를 보완하기 위하여 개발되었다. 이 기법은 실제 기준국을 사용하는 대신 가상의 기준국을 사용한다. 상시 관측소의 계측 데이터에 기반하여 생성되는 가상 기준국의 보정 데이터는 기존의 기준국과 동일하게 이동국에 데이터를 전송하는 기능을 수행할 수 있다. RTK 기법은 Fig. 1과 같이 중앙 통제국에서 실시간으로 연결된 GPS 상시관측 네트워크를 기반으로 한다. 중앙통제국에서는 3개 이상의 상시 관측소에서 계측된 GPS 데이터를 실시간으로 수집하고, 이를 바탕으로 바이어스 오차, 전리층과 대류권에 의한 신호지연오차 등을 처리한다. 이렇게 제거된 데이터를 가상 기준국의 가상 관측치를 생성하게 되며, 분리된 오차들은 가상 기준국에서의 보정치를 산출하는데 이용한다. 이동국에서는 중앙통제국에서 계산된 기준국의 관측데이터와 보정데이터를 수신하고, 이를 통해 정밀한 이동국의 위치를 결정하게 된다(Landau et al., 2002).

Concept of VRS-GPS
VRS-GPS 컨트롤러 시스템은 Fig. 2와 같이 수신기와 컨트롤러, 그리고 스마트장비로 이원화 되어져 있다. 기존 시스템은 현장 적용에 있어 컨트롤러 UI (User interface) 사용의 불편함과 제한된 범용성 등이 한계점으로 인식되었다. 따라서 본 연구는 이러한 한계를 보완하기 위해 VRS-GPS 컨트롤러 시스템을 스마트 장비로의 일원화하여 시스템의 사용성과 효율성을 개선하였다.
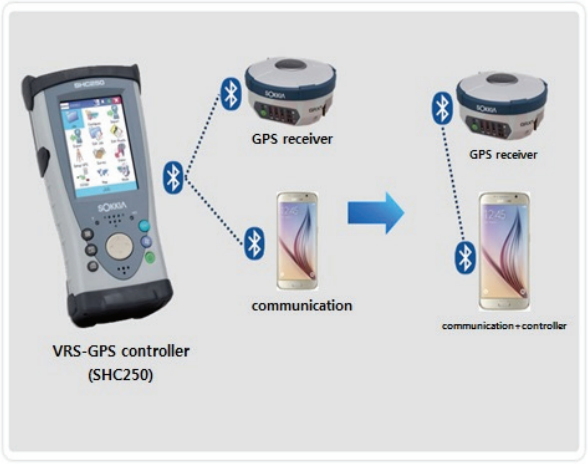
Improvement Plan of GPS System
2.2 컨트롤러 시스템 개선을 위한 설계
고가의 컨트롤러 시스템을 스마트장비로 전환하기 위하여 전용 소프트웨어를 개발하고 수신기와의 호환성에 대한 문제를 해결함과 동시에 수신된 데이터의 정밀도분석을 수행하고자 한다.
VRS-GPS 이동 측위 과정은 크게 세 단계로 진행된다. 첫 번째로 이동국의 대략적인 위치를 모바일 통신방식인 CDMA (Code Division Multiple Access)를 이용하여 NMEA 형식으로 Network-RTK서버에 전송한다(Wilson et al., 2002). 서버에서는 전송받은 이동국 위치에 인접한 상시 관측소들의 데이터를 이용하여 전리층, 대류층, 위성 관련 오차 등과 같은 계통오차를 계산하고 이동국 근처에 가상기준점을 생성한다. 마지막으로 생성된 가상 기준점의 위치 및 보정정보를 NTRIP (Network Transport of RTCM via Internet Protocol) 방식으로 이동국에 전송하고 이 정보를 이용하여 상대측위 기법으로 이동국의 정밀한 위치를 결정한다(Fig. 3).

Flow Chart of VRS-GPS
2.3 위성신호 및 주파수 시스템 호환성 해결방안
데이터 통신은 국토지리정보원에서 보내는 데이터와 GPS 수신기에서 송출하는 데이터를 안드로이드 기반 스마트장비로 전송받아서 좌표설정 및 변환을 수행하고 위치정보를 표현하도록 하였다. 그리고 여기서 발생되는 GPS 위성신호의 통신환경에 대하여 수신기 및 단말기와의 주파수 호환성을 해결해야 한다. 안드로이드 기기의 대부분은 2.0 이상의 블루투스 모델을 탑재하고 있으며, 최근 출시되는 고 사양의 스마트장비의 경우 4.x 버전의 블루투스 수신기를 내장하고 있는 실정이다. 블루투스는 기기와 버전별로 호환성이 높아 별도의 설정 없이 두 장비간의 연결이 가능하다는 것이 큰 특징이다(Fig. 4).
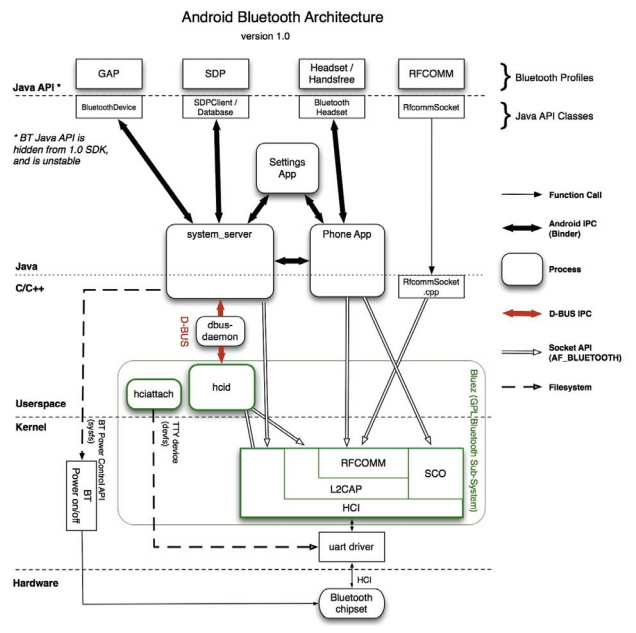
Android Bluetooth System (Yuen, 2009)
GNSS 데이터는 NTRIP 프로토콜을 사용하며, 하이퍼텍스트 전송규약(HTTP 1.1)을 기반으로 한 통상적인 프로토콜이다. 또한 NTRIP 서비스는 인터넷 망을 통하여 GPS 보정신호를 전송하는 방법으로 인터넷을 통한 실시간 GPS 데이터를 지원한다. NTRIP의 주요특징은 대중적인 HTTP를 기반으로 쉽게 구연할 수 있고, 특정 지역이나 암호화된 콘텐츠의 지원에 국한되지 않으며, TCP/IP를 사용하기 때문에 이동하는 모든 IP 네트워크는 스트리밍(Streaming)이 가능하다.
본 연구에서 사용하는 안드로이드 기반의 블루투스 역시 이러한 프로토콜을 지원하기 때문에 데이터 송수신에는 문제가 없다. 그리고 GPS 수신기와 스마트장비 간의 데이터 및 통신규격이 일치하면 수신기에서 송출되는 좌표 값을 안드로이드 기기에서 송신해서 위치정보(X, Y, Z)를 데이터로 변환해 추가적인 가공 및 처리를 할 수 있도록 설계하였다(Fig. 5).
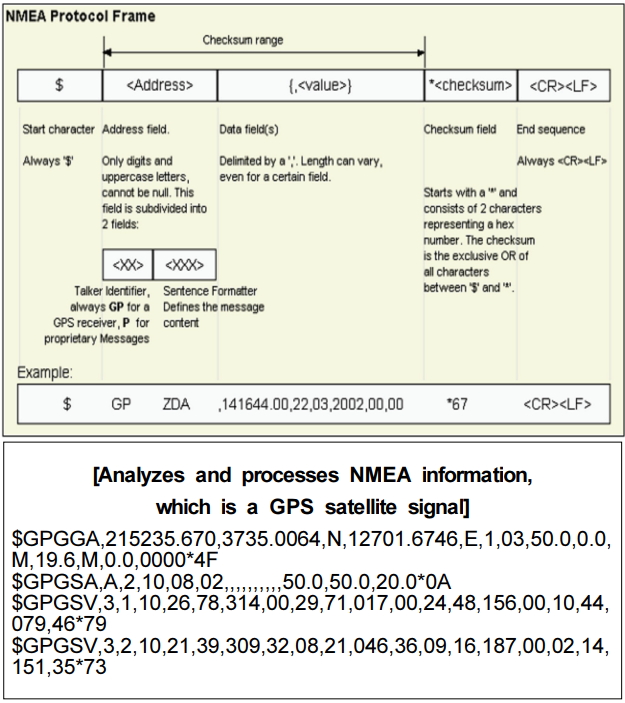
NMEA Protocol
GPS 응용프로그램 개발을 위해 안드로이드 블루투스 API (Application Programming Interface)를 사용하였다. 사용된 API의 페어링(Pairing)은 스마트장비의 블루투스 연결 기능을 이용하여 스마트장비와 GPS 수신기를 연결한다. 그리고 퍼미션(Permission)은 블루투스의 연결을 요청하고, 이를 수락하며, 데이터 송수신의 응답기능을 담당하도록 하였다.
2.4 개선설계 및 적용
VRS-GPS 컨트롤러 개선을 위한 소프트웨어 개발 프로그램은 Java Delphi C#을 사용하였고, 전체적인 기능과 처리방법, 그리고 앱의 디자인 등을 고려하여 설계하였다.
개발된 안드로이드 기반 앱은 국토지리정보원에서 보내는 수신 데이터를 스마트장비의 테더링(Tethering)을 통하여 수신하여 스마트장비에서 위치정보를 처리하고 디스플레이 되도록 설계하였다. 또한 측정된 위치정보는 구글맵 등과 연동하여 실시간 측점좌표가 생성되고 결과 값을 도출할 수 있도록 적용하였다.
사용자 인터페이스의 경우 너무 복잡하지 않으면서 간결하고 중요한 기능을 쉽게 적용하고 처리될 수 있도록 심플하면서도 강력하게 구성하는 것을 핵심으로 적용하였다. 기존 컨트롤러의 경우 많은 기능이 복잡하게 연결되어져 있었으며, 자주 사용하지 않는 기능까지 나열되어져 있다는 문제점을 보완하여 현장에서 가장 많이 사용되는 측량기법과 표현, 그리고 응용능력에 중점을 두어서 설계하였다.
Fig. 6은 최종 개발된 안드로이드 앱 구성도를 도식화하여 표현하였으며 개발된 앱의 명칭을 SGSA (Smart Gps Survey App)라고 하였다.

Construct of Android App
SGSA를 개발하는 과정에서 NMEA 데이터(경위도)를 NEZ좌표 시스템 체계로 변환하는 모듈(GPGGA 분석)을 개발하여 적용하였다. Fig. 7은 NMEA 데이터에 대하여 각각의 모듈별 구성도를 도식화하여 나타내었다.

Construct of NMEA Module
여기서, 072118은 그리니치 표준시간, 3717.8058564는 위도, 12658.4653041은 경도, 1은 Fix를 나타냄(0: Invalid, 1: GPS 위성 고정, 2: 정밀보정, 4: Fix 데이터를 고정시킴, 5: Fix 데이터를 유동시킴), 14는 위성수신 개수, 0.76은 위성수신 각, 62.9237, M은 해수면 기준고도, 19.6149, M은 타원체고를 나타낸다.
3. SGSA 시스템 위치정밀도 분석
3.1 실험대상 지역 및 현황
개발된 SGSA 시스템에 대한 위치정밀도 분석을 위하여 현장실험을 실시하였다. 실험지역은 통합기준점에 대하여 동부⋅중부원점으로 나누어 실시하였으며, 실험 기준점의 수는 부산권역 7점, 김해권역 6점, 서 부산 권역 7점, 총 20점으로 선정하였다(Table 1). 결과 값의 비교 분석을 위하여 실험기간은 2016년 11월과 2017년 11월에 각각 1회씩 측정하여 위치정밀도를 분석하였다(Fig. 8). Fig. 9는 각 지점에 대하여 Static GPS 측량을 실시하는 모습을 나타내었다.

Status of National Reference Point

Test Area

Static Survey
3.2 GPS 오차 및 지오이드 보정
GPS의 정밀측위에 직접적으로 영향을 주는 요인으로는 대표적으로 전리층 및 대류층 지연오차 그리고 위성의 궤도오차, 위성시계, 다중경로 등의 오차요인이 있다. GPS 신호가 통과하는 공간상의 서로 다른 매질특성과 지형적인 형상은 GPS 위치정확도와 깊은 관련이 있으며, 특히 기준국과 사용자와의 두지점간 기선거리가 멀어질 경우, 위치오차에 대한 불확실성이 높아진다.
GPS 수신기에는 L1과 L2 두 주파수를 모두 수신할 수 있는 이중 주파수용 수신기와 L1 주파수만 수신하는 단일 주파수용 수신기가 있다. 이중 주파수용 수신기는 고가인 반면에 두 개의 주파수 차이를 이용하여 전리층에 의한 신호지연오차를 보정하거나 대부분 소거할 수 있다. 반면, 단일 주파수용 수신기는 저가이지만 전리층에 의한 신호지연오차를 완전히 제거할 수 없는 단점을 가지고 있다. 따라서 단일 주파수용 수신기는 이중 주파수 수신기로 이루어진 지상의 GPS 상시관측소 데이터를 이용하여 추정된 전리층 모델을 사용함으로써 그 오차를 상당부분 보정할 수 있다(Rizos, 2002). 본 연구에서는 의사거리와 반송파 위상 데이터를 동시에 활용하여 관측시간별로 데이터를 처리하였다. GPS의 L1주파수의 경우 의사거리 데이터의 관측 값은 Eq. (1)과 같다(Klobuchar, 1987).
여기서, R(t) GPS 위성과 수신기 사이의 거리
δtsym 위성과 수신기 간의 시각동기화
δta 대기의 영향에 의한 오차
δts-δtr 위성과 수신기의 시계오차
nR 관측의 잡음(noise)
GPS 기준국과 사용자의 공통된 L1 관측정보를 활용하여 이중차분(Double Differencing)을 하면 위성시계와 수신기 시계오차는 제거되지만, 기선의 거리가 멀어지면 전리층과 대류층에 의한 오차는 제거되지 않는다. 따라서 기선거리에 따라 오차용인을 고려하면 정밀한 위치정보를 산출할 수 있다.
본 연구에서 지오이드 분석은 타원체를 통해 지구의 모양과 수학적 모델을 사용하여 좌표계 및 위치 기준으로 사용하지만 높이에 대한 데이터를 사용할 때에는 지오이드 모델을 적용하여야 한다. 따라서 실험에 적용된 EGM 2008 (Evaluation of the Earth Gravitational 2008)지오이드 모델은 다양한 지점의 기준점에 대하여 일정간격으로 재배열하고(Fig. 10) 피팅(Fitting)에 대한 간격별 상관거리 분석을 통하여 최종 개선된 모델을 적용하도록 하였다(Figs. 11, 12).
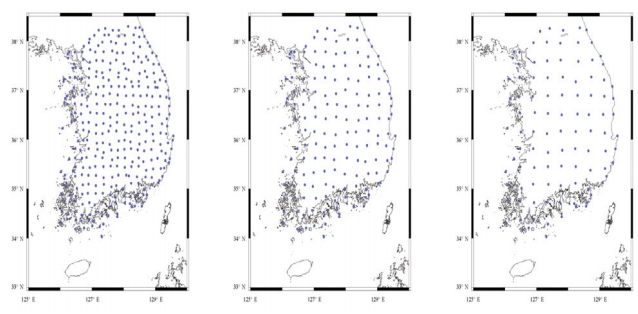
Regular Rearrangement of National Reference Point
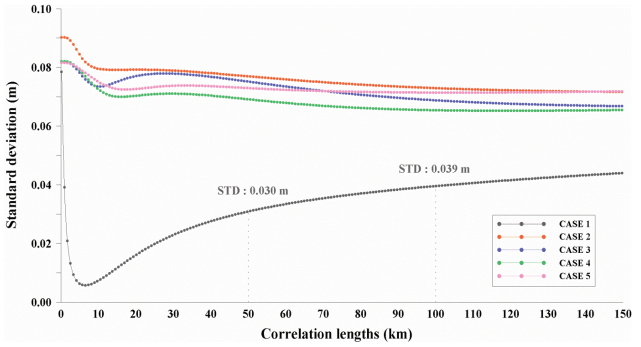
Correlation Analysis of Rearrangement Fitting
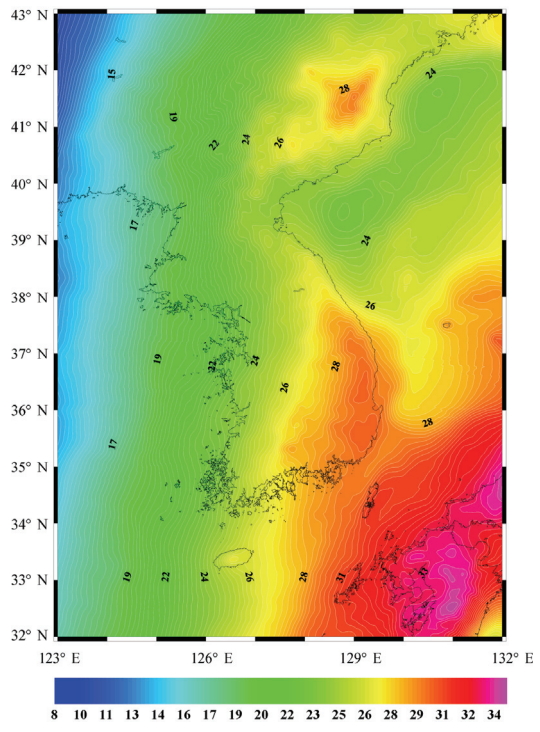
Final Geoid Model (EGM 2008)
3.3 SGSA 시스템의 위치정밀도 분석
SGSA의 기준점 검증을 위하여 국가기준점 20개에 대하여 GPS 측량을 실시하였다. 먼저 기준 값 취득을 위하여 기준점 정밀측정 및 보정을 수행하였으며, 이를 기반으로 L1, l2, SGSA에 대한 측량을 실시하였다.
측량장비는 Sokkia사의 VRS-GPS장비를 사용하여 Static GNSS측량을 각각 30분씩 수행하였고, 5초 간격으로 약 360점을 획득하여 처리하였다. Table 2는 기준점 20점에 대하여 2016년 11월과 2017년 11월에 각각 취득한 위치정보 좌표에 대한 평균값을 나타내었다.

Result of Reference Point Survey (average 2016, 2017)
FIg. 13은 개발된 SGSA를 이용하여 측량을 수행하는 내용을 간략히 제시하였다. 먼저 스마트장비에 테드링을 설정하고 GPS와 스마트장비를 블루투스로 연결하도록 하였다. 다음은 좌표계를 설정하는 과정을 거치고, GPS 수신값에 대한 정밀도 등의 옵션을 설정하게 된다. 그리고 국토지리정보원과의 통신을 통하여 GPS 수신 값을 전송받게 된다.

SGSA Survey
좌표 측정 및 현황측량, 그리고 측설 등의 다양한 측량방법을 선정하여 측량을 할 수 있도록 구성되어져 있으며, 본 연구에서는 Static 측량방식으로 수행하도록 하였다. 그리고 스마트장비를 통하여 저장된 데이터를 메일로 전송되는 기능과 좌표 값의 다양한 포맷을 지원하여 다른 프로그램과의 호환성을 높인 것이 특징이라고 할 수 있다. 또한 측정된 좌표 값에 대하여 구글과 연동하여 지도상에 표시가 가능하도록 설정되어져 있으며, 좌표 값의 저장 및 현황보기 등으로 현장에서 실시간 측정된 좌표에 대하여 수정, 보완이 가능하도록 설계되었다.
국가기준점에 대하여 측정된 보정 값을 기준으로 L1, L2, SGSA에 대하여 PDOP (Positional Dilution Of Precision)과 H-RMS (Horizontal Root Mean Square), V-RMS (Vertical Root Mean Square)를 각각 비교하여 위치정밀도를 구하였다. 처리된 측정값에 대하여 Fig. 14는 위성의 3차원 위치정밀도 저하율을 제시하였으며, Figs. 15와 16은 수평위치정밀도오차(H-RMSE)와 수직위치정밀도 오차(V-RMSE)에 대한 결과를 나타내었다.

Position Dilution of Precision (PDOP)
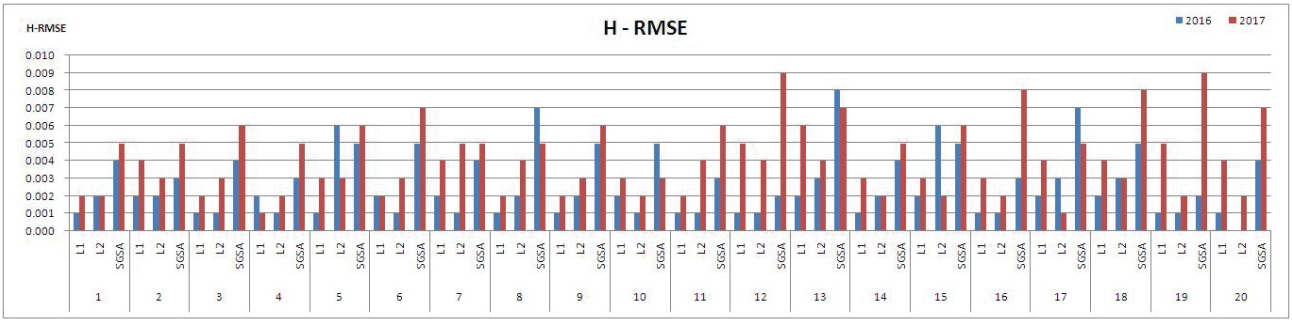
Horizontal Root Mean Square Error (H-RMSE)
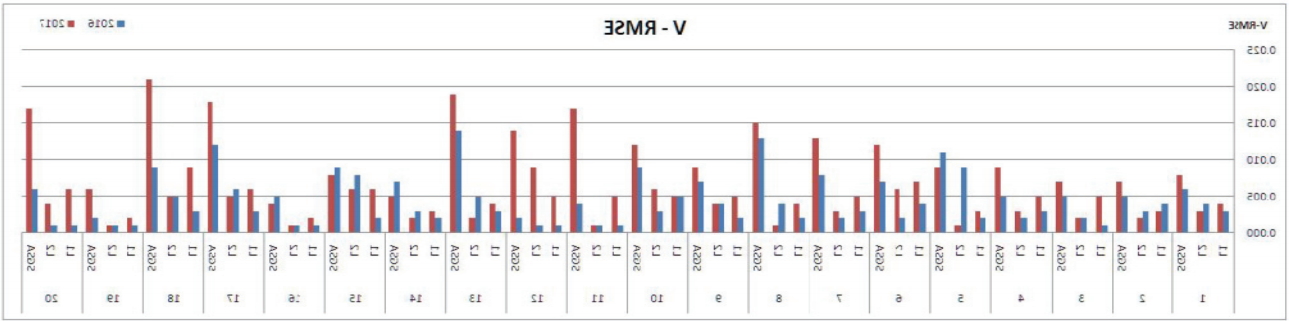
Vertical Root Mean Square Error (V-RMSE)
VRS-GPS 측량을 통하여 취득한 값은 신뢰성을 확보하기 위하여 동일 시간대에 진행하였고, 지역적 편차에 대하여 정밀지오이드를 산정하여 적용하였으며, 측정된 값에 대한 평균제곱근오차(RMSE)는 Eq. (2)을 적용하여 계산하였다.
여기서, ONetwork-RTK : Network-RTK 위치좌표
OStatic : 정확한 Static GNSS 좌표
n : 관측점 총수
PDOP의 경우 L1, L2, SGSA에 대하여 1~2사이의 값이 나타났으며, 위성의 위치정밀도 저하율에 대하여 충분히 신뢰할 수 있는 결과 값이라고 할 수 있다(Yeu et al., 2016).
평면위치정밀도의 경우 「GPS에 의한 기준점측량 작업규정」의 10조 1항의 GPS 기준점측량에서 장비의 성능이 L1, L2에 대하여 평면정확도를±(5mm+1PPM×D) 이상으로 규정하고 있다(NGII, 2016b).
그리고 항공사진측량 작업규정에서는 지상기준점 측량 허용오차를 평면 ±10.0 cm, 표고 ±5 cm 이상을 만족하도록 규정하고 있다(NGII, 2016a).
실험결과 H-RMSE의 경우 SGSA 측정값이 0.004 m ~ 0.006 m의 값을 얻을 수 있었고, V-RMSE는 0.007 m ~ 0.012 m의 결과 값이 나타났다. 일반적으로 VRS-GPS 측량장비의 경우 수신기의 고정 정밀도는 수평(H=±3 mm+0.5 ppm), 수직(V=±5 mm+ 0.5 ppm)의 정밀도로 측량할 수 있다. 개발된 SGSA는 기존 고정밀 GPS 장비의 정밀도보다 다소 낮은 결과 값이 제시되었지만 현장에서 사용할 수 있는 허용정밀도 범주 내에는 충분할 것으로 판단된다.

Location Accuracy Analysis by Receiver
4. 결 론
본 연구에서는 VRS-GPS 컨트롤러 시스템 개선을 통한 위치정밀도 분석에 대하여 연구하였다. 기존의 컨트롤러는 시스템의 확장성과 응용성, 그리고 처리속도가 느린 문제점이 있다. 이러한 문제점을 보완하기 위하여 스마트장비를 이용한 컨트롤러 시스템의 일체화에 대한 연구를 수행하였고, 전용 앱인 SGSA를 개발하여 위치정밀도에 대하여 비교, 분석해 봄으로써 다음과 같은 결과를 얻을 수 있었다.
SGSA 시스템은 안드로이드 기반으로 설계하였고, NMEA 데이터(경위도)를 N, E, Z좌표 시스템 체계로 변환하는 모듈(GPGGA 분석)을 개발하여 적용하였다. 그리고 수신데이터의 분석, 계산, 저장, 수정 및 구글 지도와의 연동성 기능 등을 강화하여 기존 GPS 컨트롤러 상에서 직접 처리하기 어려운 부분에 대하여 쉽게 처리할 수 있도록 개선하였다.
위치정밀도 분석을 위하여 20개의 국가기준점에 대하여 2016년 11월과 2017년 11월, 2회의 정밀측량을 수신기별로 실시하였다. 그리고 일정간격으로 기준점들을 재배열하고 간격별 상관거리 분석을 통한 EGM 2008지오이드 모델을 적용하였다.
VRS 측량의 정확도를 판별하는 인자 중 하나로 위성의 기하학적 위치정밀도 배치를 나타내는 PDOP에 대한 실험결과 1.802~1.816의 값을 얻을 있었으며, 충분히 신뢰할 수 있는 범주 내에 있는 것을 확인하였다.
평면과 수직위치정밀도의 경우 고정밀 위치정밀도 측량에는 다소 미치지 못하였지만, 항공사진측량 및 공공측량 작업규정에 대하여 일정부분 만족함을 알 수 있었고, 충분히 현장에서 기준점 및 응용측량으로 사용할 수 있을 것으로 판단된다.
본 연구결과는 향후 실험지역의 다변화와 시스템 안정화에 대한 실험을 충분히 거쳐서 정밀도 향상을 도모한다면 기존 GPS 컨트롤러 시스템을 대처할 수 있을 것으로 사료된다.
Acknowledgements
본 연구는 중소기업청에서 지원하는 산학연협력 기술개발사업의 연구비지원(No. C0396097 연구사업)에 의해 수행되었습니다.