

1. 서 론
최근 몇 년간 국내에서는 여름철 마른장마의 영향으로 인해 가뭄현상이 빈번히 발생하고 있어 농경지의 농업용수 부족 등 많은 피해가 생기고 있다. 기후변화에 대한 정부간패털(Intergovern- mental panel for climate change, IPCC) 5차 평가보고서에 따르면, 미래 기후는 폭염, 가뭄, 홍수, 한파 등 극한기후현상이 빈번하게 일어날 것이며, 이는 국가적인 위험에 빠뜨릴 수 있다고 보고하고 있어(IPCC, 2014) 정부차원에서 가뭄현상을 예방하고 대응하기 위한 노력이 필요하다. 이러한 측면에서 행정안전부, 환경부, 국토교통부 등 정부 행정기관에서는 ‘2018년 가뭄종합대책’을 발표하였고, 신속하고 체계적인 가뭄 대응을 위해 관계부처 간 공동의 노력을 추진하고 있다.
가뭄에 대한 신속하고 체계적인 대응을 위해서는 무엇보다 가뭄현황에 대한 정밀한 진단이 요구된다. 이를 위해 현재 농어촌공사 및 각 지자체에서는 수위 계측기를 설치하여 저수율과 저수량 등에 대한 모니터링을 실시하고 있다. 그러나 수위 계측기에 의한 방법은 수위를 실시간으로 모니터링 하는데 효과적일 수 있으나, 퇴적물의 변화와 그에 따른 저수량의 영향을 파악하는데 어려움이 있다. 또한, 모든 저수지에 계측기를 설치하기에는 비용과 관리 인력이 요구된다.
이러한 단점을 보완하기 위해 최근 수심측량장비에 의한 3차원 지형정보를 분석하는 연구들이 두드러지고 있다. 관련 연구들을 살펴보면, Seo et al. (2002)은 저수지 용량 결정을 위한 내용적 측량의 기법을 The global positioning system (GPS)와 음향측심기의 조합에 의해 3차원적 위치 데이터를 취득할 수 있는 방법을 적용함으로서 기존 측량 자료와의 비교 및 정확도 향상 방법에 대해 연구하였다. Park et al. (2003)은 Differential global positioning system (DGPS), Real-Time kinematic (RTK) GPS, Echo sounder 조합해석에 의해 하구, 하상 모니터링 시 효율성을 높이기 위한 연구를 수행하였다. Lee et al. (2005)은 RTK-GPS와 Echo Sounder를 이용하여 경주지역 저수지에 대해 내용적과 3D 모델링으로 시각화하였고, 과거자료와 비교하여 효율성을 분석하였다. Lee and Kim (2007)은 GPS와 음향측심 관측데이터의 합성 및 변환프로그램을 작성하여 하상의 3차원 좌표를 생성하고 Geographic information systems (GIS) 데이터베이스를 효율적으로 구축할 수 있는 3차원 하상측량시스템을 구현하였다. Kang and Han (2012)은 고⋅저주파 음향측심기와 GPS를 탑재한 무인 탐사선을 이용하여 저수지의 하상 데이터를 획득하였고, 수치표면모형 및 수치표고모형을 생성하여 퇴적물을 모니터링 하였다. Park and Park (2012)는 GPS와 Echo Sounder의 조합을 통해 준설 전․후 하상의 공간정보를 획득하고, 하천의 준설량을 산정하였다.
이상과 같은 선행연구의 공통점은 보트에 위치정보를 취득할 수 있는 GPS 센서와 수심을 측정할 수 있는 음향측심기를 동시에 탑재하여 하상정보를 측량하고 3차원 지형정보를 구현하고 있다. 또한, 이러한 정보를 바탕으로 하천 및 저수지의 수위 및 퇴적물 모니터링을 실시하고 있어 가뭄현상을 대비하고 위한 다양한 방법론을 적용하고 있다. 하지만 음향측심기의 경우, 보트의 운용방법과 유용성에 대한 부분이 중요한데, 수심이 낮고 식생이 분포하고 있는 하천 및 저수지의 가장자리에는 보트가 쉽게 접근하기 어려워 정확한 수심정보를 취득할 수 없다는 문제점이 있다. 이러한 관점에서 저수량과 수위의 정확한 정보 취득을 위해서는 보다 진보된 기술과 방법론이 필요하다.
따라서 본 연구는 선행연구의 문제점인 저수지 가장자리 부분의 정확한 수심측정 및 지형정보 구축을 위한 방법론을 연구하고자 하였으며, 기존의 선행연구에서 적용된 GPS 및 음향측심기가 탑재된 무인보트와 무인항공기(Unnamed aircraft vehicle, UAV)의 영상정보를 활용하여 저수지의 3차원 정보를 구축하는 연구를 진행하였다.
2. 연구대상지 및 방법
2.1 연구과정
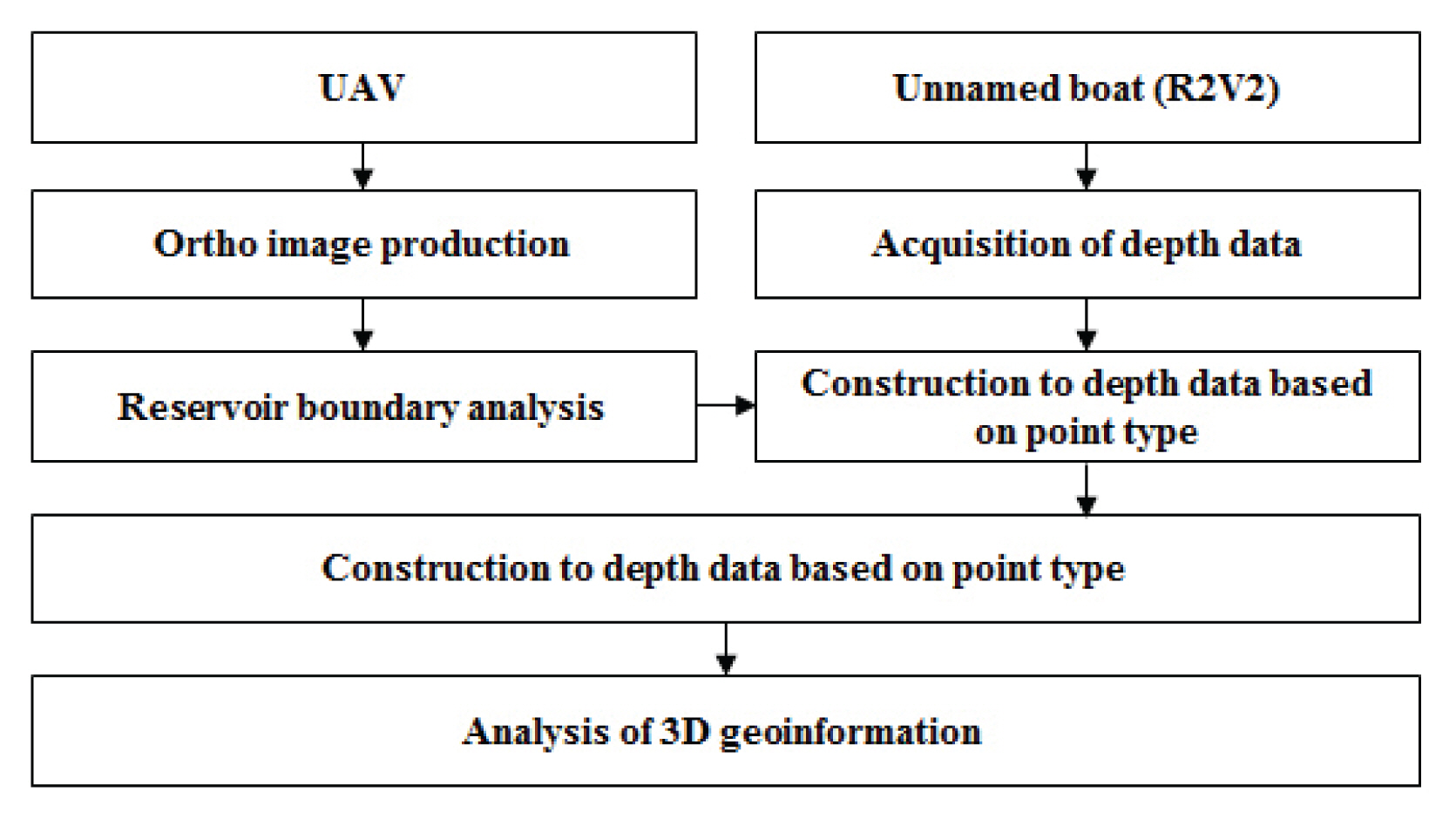
본 연구는 Fig. 1과 같은 과정으로 수행하였다. 먼저 UAV를 이용하여 광학영상을 촬영하였고, 정사영상 제작을 통해 저수지 수면경계를 추출하였다. 다음으로 무인보트의 음향측심기를 활용하여 저수지의 수심을 측정한 후, 수면경계와 합쳐 공간분석을 통해 3차원 지형정보를 분석하였다.
2.2 연구대상지
본 연구는 경주시 율동에 위치한 하염불지를 대상으로 연구를 수행하였다(Fig. 2). 하염불지는 율동 주변에 위치하는 대규모 농경지의 급수를 위해 조성된 농업용수용 저수지로서 매년 발생되고 있는 가뭄현상으로 인해 저수지의 담수율이 낮아 여름철 용수확보에 난항을 겪고 있다. 특히 2017년의 경우 하염불지의 담수율이 38%로 매우 낮아 임시 양수장을 설치하여 운영하는 등 가뭄으로 인한 피해가 극심한 지역이다(Gukje News, 2015). 하지만 하염불지는 농어촌공사나 경주시에서 수위계측을 통해 관리하는 저수지가 아니기 때문에 저수율 또는 수위 변화 등 가뭄현상을 파악하는데 어려움이 있다. 따라서 가뭄현상에 대응하기 위해 저수지 수위 및 저수량에 대한 지속적인 모니터링이 필요한 지역이다.
2.3 UAV 영상 취득 및 수면경계 추출
UAV 영상은 BEVA 社에서 제작한 Firefly UAV에 광학카메라(Sony 社)를 탑재하여 취득하였다. Firefly UAV는 회전익 및 고정익 모드를 병행하는 기체로서 이착륙 시에는 회전익 모드로 전환되어 수직 이착륙이 가능하고, 비행 시에는 고정익 모드로 변경되어 수평비행으로 영상을 취득하게 된다(Fig. 3). 비행속도는 대략 시속 50~60 km이고, 비행시간은 최대 45분까지 가능하다. 비행고도는 10~1,000 m까지 비행이 가능하다. Firefly UAV에 대한 세부적인 내용은 Table 1과 같다(http://www.birdseyeview.aero).
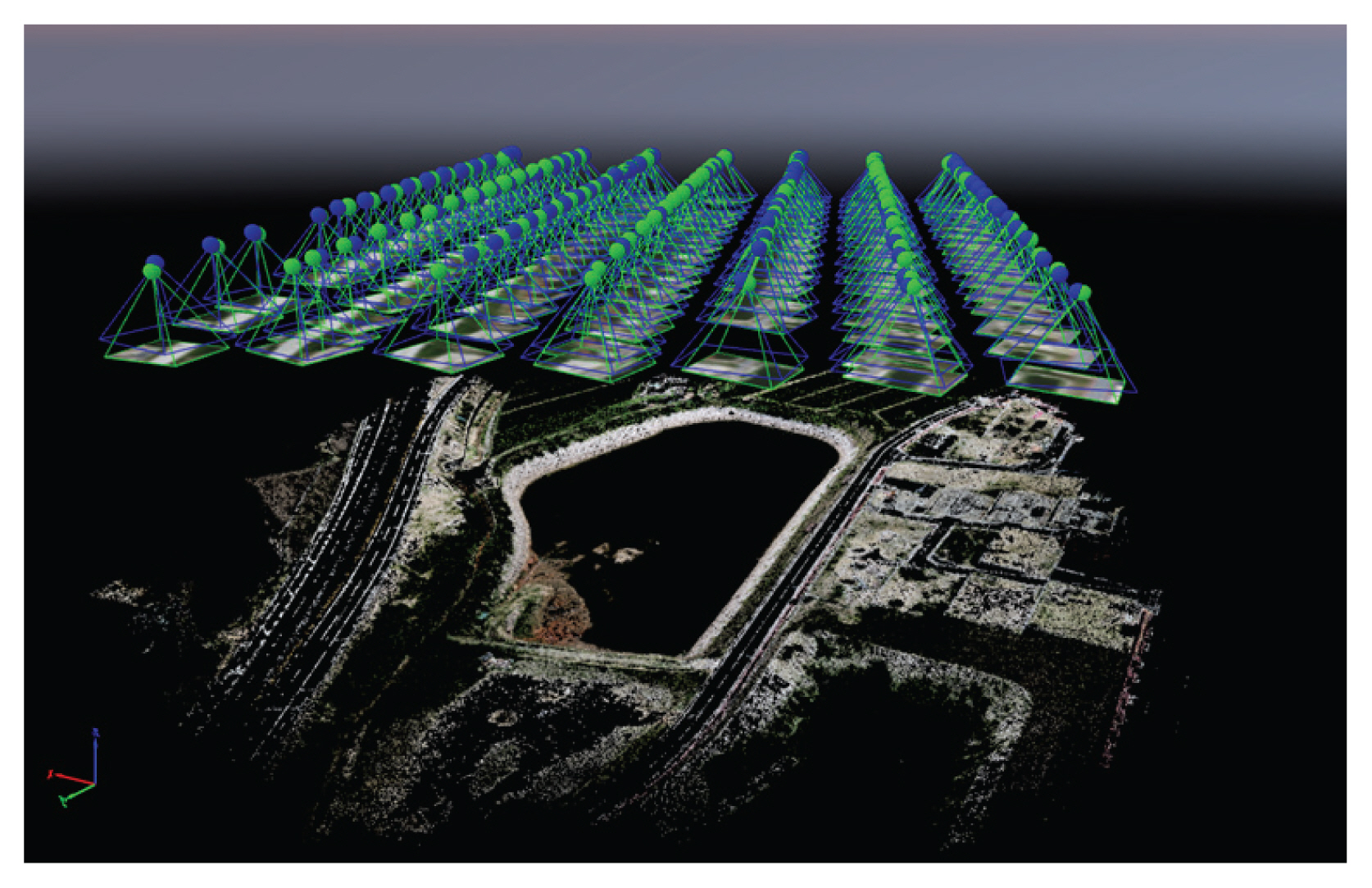
영상취득은 2018년 4월 28일에 오전 10시에 진행하였다. 운용방법은 우선 저수지 및 주변지역의 지형적 특성을 반영하여 약 20정 정도의 비행시간을 고려하여 비행경로를 설정하였다. 취득된 UAV 영상은 Pix4D Mapper 소프트웨어를 이용하여 정사영상으로 및 수치표면모델(Digital surface models, DSM)을 제작하였다(Fig. 4).
2.4 수심정보 취득
수심정보의 취득은 0.5 MHz 타입의 음향측심기(Echosounder)와 1 MHz와 3 MHz의 변환기가 각각 장착된 M9 ADCP 센서(SonTek 社)를 무인보트에 장착하여 수행하였다(Fig. 5). 음향측심법의 원리는 연속된 초음파를 수면 아래로 발사하여 하상에서 반사된 초음파가 다시 같은 경로로 발사점에 되돌아오는 원리는 이용하는 것이다.
음향측심기를 장착한 무인보트는 GPS 장치와 엔진, 배터리 등을 탑재하고 있으며, 실시간 동적관측법(Real time kinematic)에 의해 무인보트의 위치정보를 취득하게 된다. 또한 선체 내부의 자세제어 센서가 장착되어 pitch, roll 변화에 따른 데이터 보정작업도 동시에 수행하게 된다.
무인보트의 운용 시기는 UAV 촬영이 진행된 2018년 4월 28일에 동시에 수행하였다. 운용방법은 저수지의 가장자리를 먼저 운용한 뒤 저수지 내부를 측량횡단 간격 약 10 m로 운용하였다. 운용시간은 약 90분 정도이다(Fig. 5).
2.5 3차원 지형정보 분석
저수지 3차원 지형정보는 UAV 영상에서 분석된 수면경계와 무인보트 수심정보를 이용하여 분석하였다. ArcGIS 10.2 프로그램에서 수면경계의 선(line)형 정보를 1 m 간격의 점(point)형태로 변형한 후, UAV DSM의 고도 정보를 Zonal statistics 기능을 이용하여 구축하였다. 그리고 무인보트 출발 지점의 수심과 동일한 지점에 위치한 수면경계 지점의 높이와의 차이를 산출하여 수면경계의 고도 값을 보정하였고, 수면경계와 수면정보를 Union 기능을 이용하여 합쳤다. 합쳐진 정보는 공간내삽기법 중 하나인 Inverse distance weighted (IDW) tool을 이용하여 저수지의 하상단면을 분석하였다. IDW는 공간적으로 인접한 지점 사이의 값은 공통된 위치요인으로 인하여 유사성을 갖고, 두 지점 사이의 거리가 증가할수록 이러한 유사성은 상대적으로 감소하게 된다는 원리이다(Lee et al., 2011). IDW 분석시 공간해상도는 1 m × 1 m로 설정하였다.
3. 연구결과
3.1 영상정보 취득 및 수면경계 추출 결과
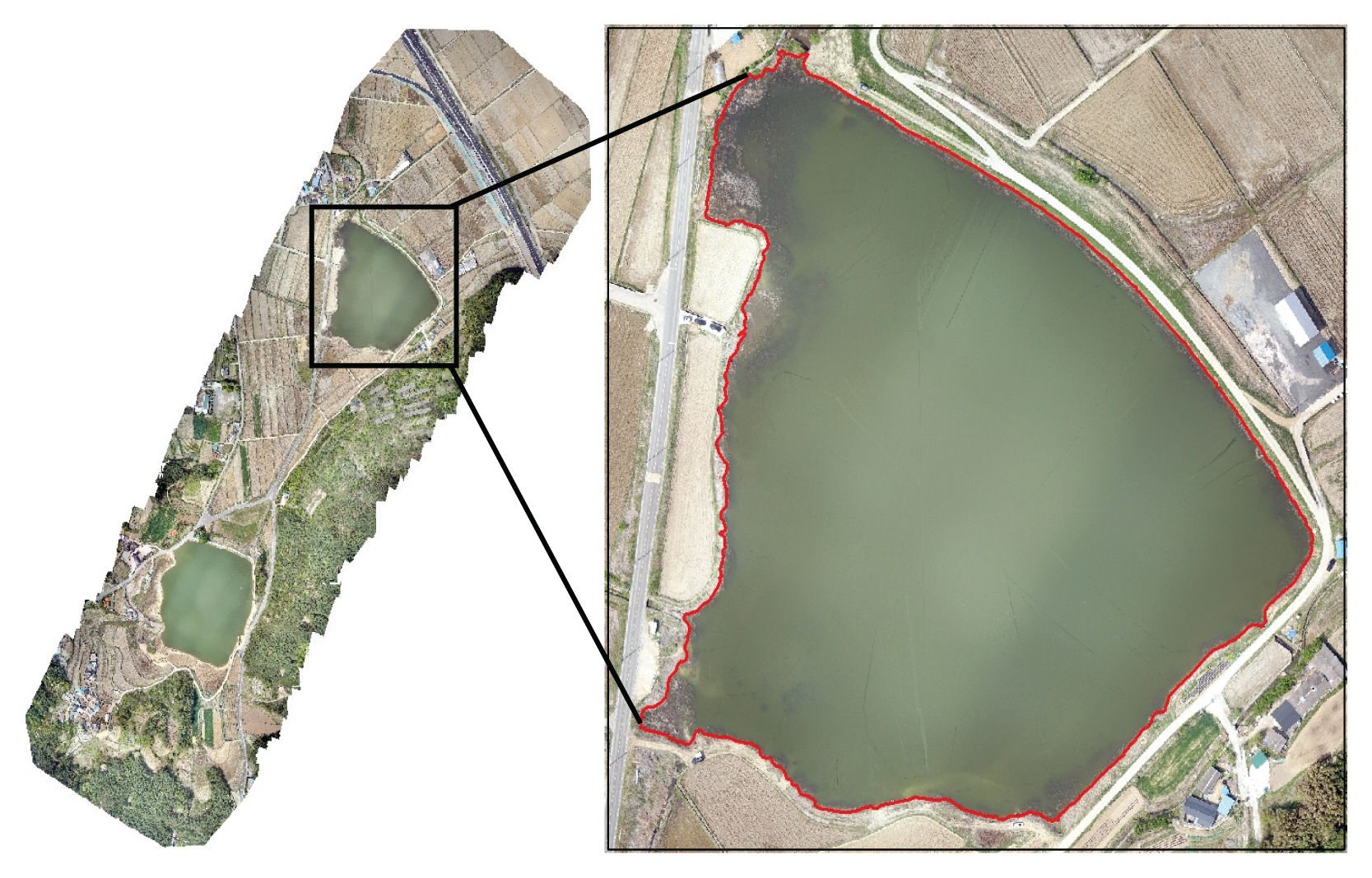
Fig. 6은 UAV 촬영영상을 정사영상으로 제작한 후, 벡터라이징을 통해 수면경계를 추출한 결과이다. 정사영상의 공간해상도는 0.3 cm × 0.3 cm으로 촬영되었다. 하염불지 저수지의 둘레길이는 1,019.5 m, 면적은 49,980.5 m2로 나타났다.
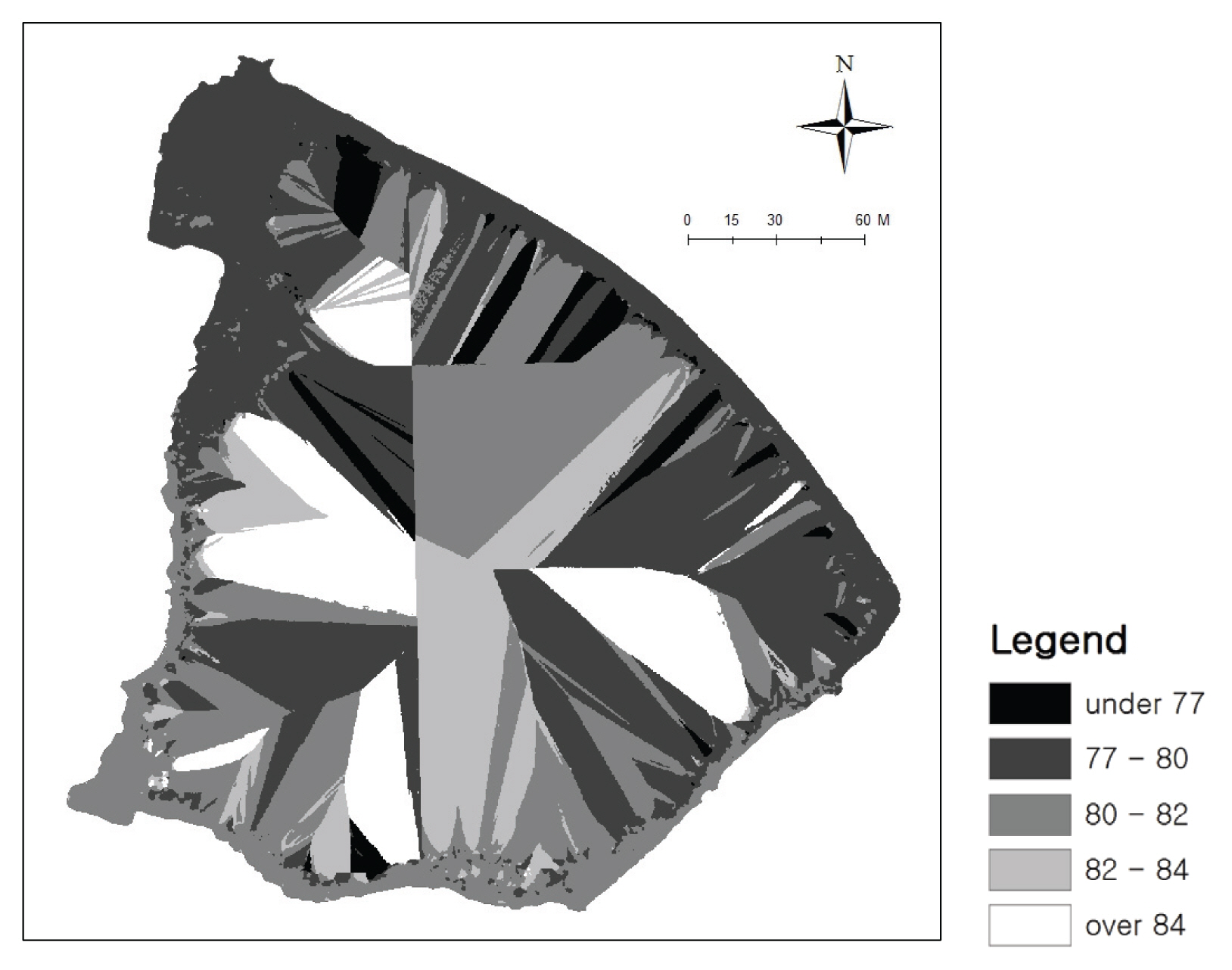
DSM을 분석한 결과는 Fig. 7과 같다. 고도 분포는 약 77~85 m 사이로 나타났다. 저수지 내부지역은 수심이 깊고 탁도가 높아 정확한 고도정보가 취득되지 않은 것을 알 수 있다. 반면에 저수지의 가장자리에서 약 1 m 이내의 경우는 고도정보가 취득된 것으로 나타났다.
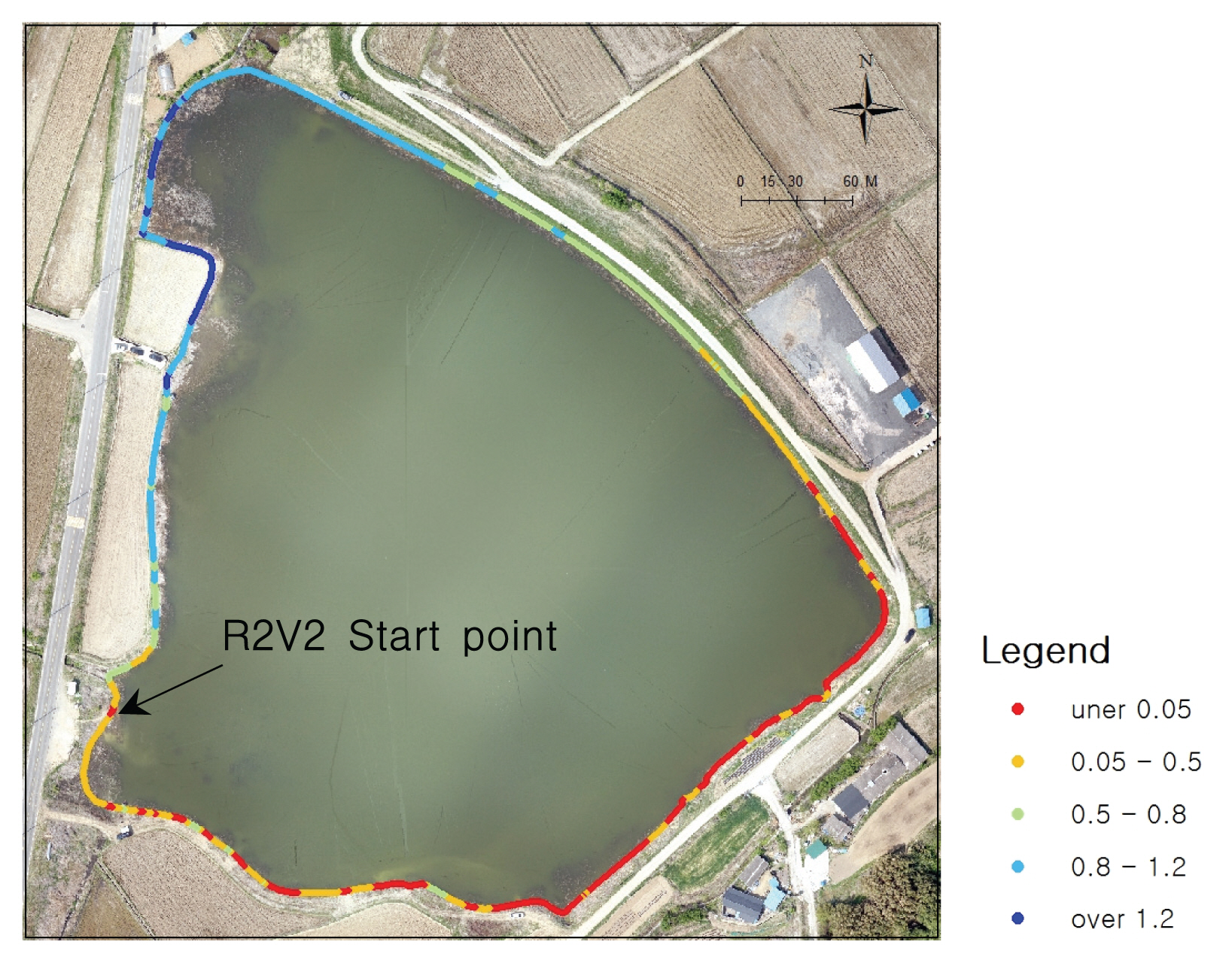
Fig. 8은 정사영상을 통해 분석된 저수지 수면경계에 DSM 고도정보를 입력한 결과이다. R2V2 운용 시작지점의 고도와 차이는 최대 1.2 m인 것으로 나타났고, 북쪽 방향에 위치한 수면경계부분이었다. 이 지역은 식생이 다소 밀집되어 있어 무인보트의 접근이 어려운 곳이다. 또한, 식생이 밀집되어 있다 보니 UAV에서 DSM 정보가 원활하게 취득되었다.
3.2 수심측정 결과
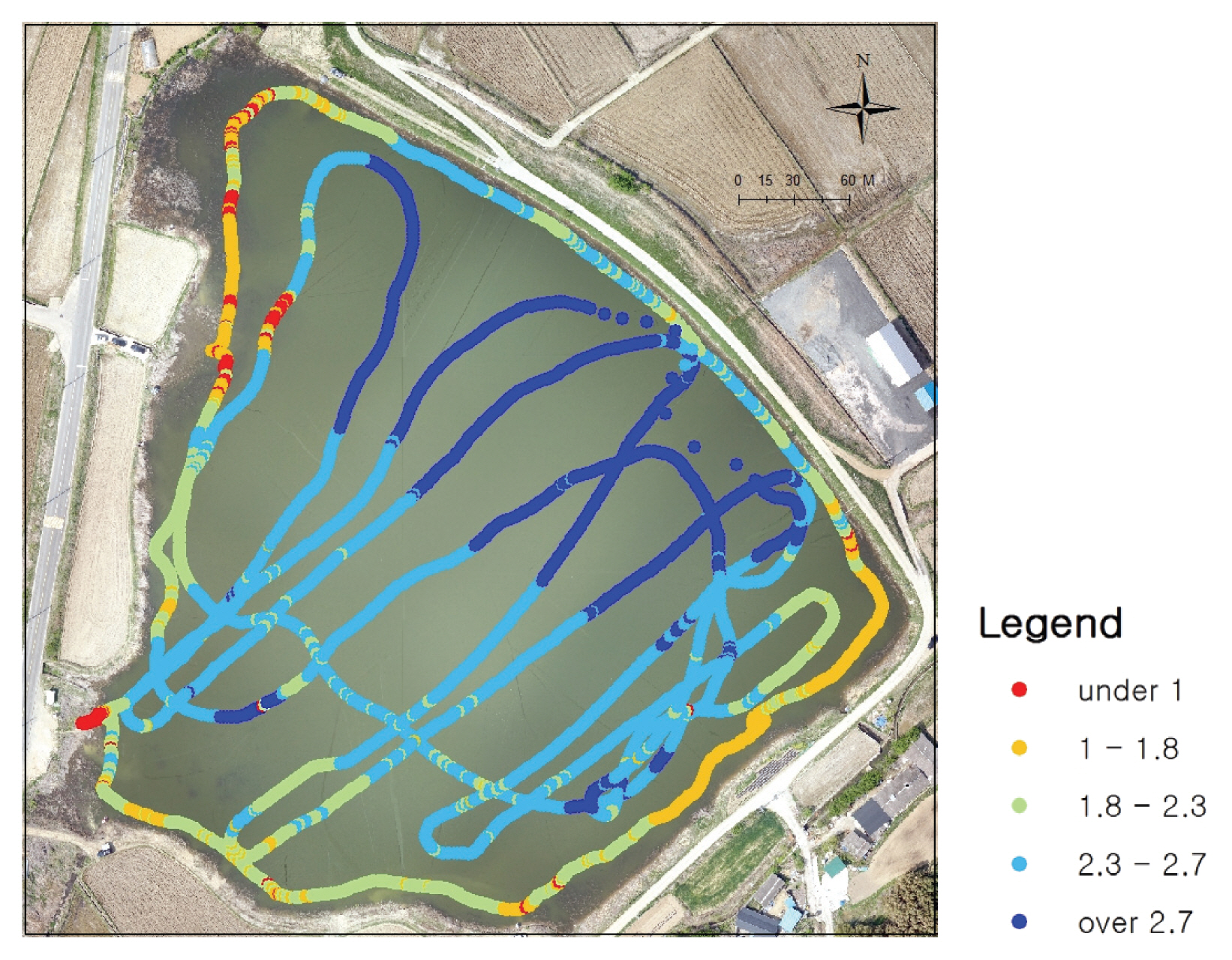
무인보트에 탑재된 음향측심기를 이용하여 저수지 수심을 측정한 결과는 Fig. 9와 같다. 총 4,338개 지점에서 수심이 측정되었고, 최대 깊이는 3.22 m로 확인되었다. 저수지 수면경계 부근은 이격거리를 약 1 m 이내로 근접하게 무인보트를 운용하였다. 다만 수생식물 서식지역의 경우 운용이 불가하여 수면 경계와 거리가 약 10 m 이내로 차이가 컸다.
무인보트 운용 시 측량횡단 간격을 약 10 m로 운용하고자 했으나, 직접 조종기에 의한 운용을 실시하다 보니 간격이 일정하지 않게 운용된 것으로 나타났다. 또한 일부 지역에서 수생식물의 서식 등으로 인해 운용 간격이 커 수심이 측정되지 않아 하상단면 분석 결과가 실제 수심과 오차가 발생할 것으로 예상된다. 이러한 무인보트의 운용에 대한 문제점은 향후 개선되어야 할 부분으로 사료된다.
3.3 3차원 지형정보 분석결과
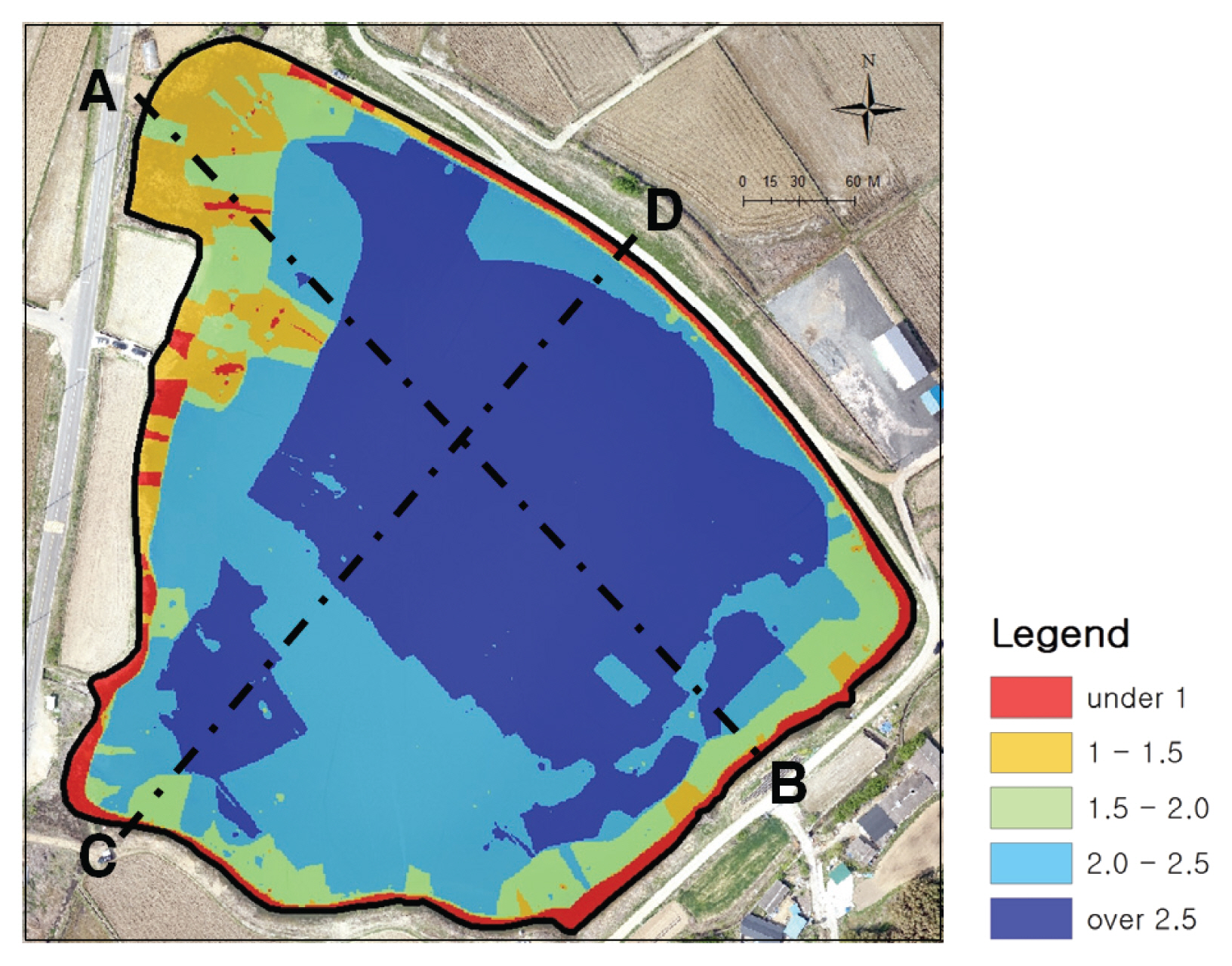
Fig. 10은 수면경계와 수심측정 자료를 활용하여 공간내삽기법을 통해 저수지의 3차원 지형정보를 분석한 결과이다. 수생식물이 서식하는 지역의 수심은 약 1.5 m 이하로 비교적 수심이 얕은 것으로 확인되었다. 저수지 내부는 대부분 수심이 2 m 이상으로 나타났다.
Fig. 11은 A→B, C→D 방향으로 저수지 하상단면과 UAV DSM을 비교한 결과이다. A에서 약 40 m 떨어진 지역은 하상단면의 수심과 DSM의 수심의 차이가 1 m 이내로 크지 않았다. 하지만 그 외 B 방향으로 갈수록 하상단면의 수심과 DSM의 수심의 차이가 크거나 일정하지 않은 것으로 나타났다. C→D 방향에서는 수심의 차이가 맞지 않았다.
따라서 수심이 얇은 일부 지역에 대해서는 UAV DSM 및 음향측심기의 수심정보가 차이가 적었으나, 나머지 지역에서는 일정한 특성 및 경향이 없었고 오차도 매우 큰 것으로 확인되었다. 이는 UAV DSM 정보가 수면경계를 추출하는 것에는 유용하게 활용할 수 있으나 수심 측정에는 한계가 있다는 것으로 나타났다. 이는 수심의 깊이와 수질, 탁도 등의 영향이 작용한 것으로 예상된다. 향후에는 수심 측정에 대한 UAV의 활용도를 높이기 위해 항공 LiDAR의 적용 등 보다 추가적이고 세밀한 연구가 필요할 것으로 판단된다.
4. 결 론
본 연구는 저수지의 가뭄현상을 정밀하게 진단하고 모니터링하기 위해 저수지의 지형정보를 정밀하게 분석할 수 있는 방법론을 마련하고자 하였으며, 이를 위해 GPS 및 음향측심기가 탑재된 무인보트와 UAV 영상정보를 활용하여 3차원 지형정보를 분석하였다. 연구내용은 음향측심기를 활용한 수심정보 취득과 UAV 영상을 활용한 수면경계 추출, 그리고 이를 통합한 3차원 지형정보 구현으로 구분할 수 있다.
저수지의 3차원 지형정보를 분석한 결과, 일부 수심이 얕은 지역의 경우에는 UAV의 DSM 정보가 원활하게 취득되어 음향측심기의 수심정보와의 차이가 약 1 m 이내로 크지 않았다. 하지만 저수지 대부분의 지역에서는 UAV DSM와 음향측심기의 수심정보 간의 일정한 특성을 보이지 않았으며, 오차도 매우 큰 것으로 확인되었다. 따라서 UAV 정보는 저수지의 경계를 추출할 시 유용하게 활용할 수 있으나, 수심을 측정하기에는 한계가 있는 것으로 나타났다.
본 연구는 기존 선행연구의 문제로 지적되었던 저수지 가장자리 부분의 정밀한 수심정보 취득 및 3차원 지형정보를 구현하기 위해 음향측심기와 UAV 영상정보를 동시에 활용하였다는 점에서 학술적 의의를 가지고 있다고 판단된다. 또한, 연구의 결과물은 정확한 수위 및 저수량 산출과 퇴적물을 모니터링 하는데 유용하게 활용할 수 있어 가뭄 대응을 위해 효과적인 자료라 사료된다. 하지만 연구결과에 있어, UAV 영상은 정밀한 수면경계 추출은 가능하였으나, 무인보트가 접근하기 어려운 저수지 가장자리의 수심정보를 취득하는 것에는 한계점을 보였다. 이는 추가적인 기술력을 적용하여 보완해야할 점으로 판단된다. 또한, 저수지의 수심을 측정하기 위해 음향측심기를 활용한 경우 정밀한 지형정보 구현을 위해서는 일정한 측량횡단 간격에 의한 무인보트의 운용 및 정보취득과 보다 조밀한 간격의 측정이 필요하다. 본 연구에서는 인위적인 조작에 의해 무인보트를 운용하여 간격이 불규칙하였고, 정밀한 정보를 취득하지 못한 점이 한계로 남았다. 이러한 점은 무인자동항법 기능을 추가적으로 탑재하여 보완할 필요가 있을 것으로 사료된다.
향후에는 본 연구에서 문제점으로 지적되었던 부분을 보완하여 보다 정밀한 저수지의 3차원 지형정보를 구축할 예정이며, 이를 통해 가뭄문제 해결을 위한 다양한 방안을 제시할 것이다. 또한 최근 위성영상 등을 활용한 다양한 가뭄진단 연구가 각광받고 있다. 이에 가뭄현상을 지속적으로 모니터링하고 대응방안을 마련할 수 있도록 위성영상 등 다양한 기술력을 적용한 연구를 이어갈 계획이다.