차량용 강우센서를 이용한 강우 관측 방법 개발 연구
Development of a Rainfall Observation Method Using Vehicle Rainfall Sensors
Article information
Abstract
국지성 집중호우의 증가로 인하여 홍수 피해 역시 증가하고 있다. 홍수 피해를 막기 위해서는 강우량 정보는 매우 중요한 요소이다. 하지만 현재 운영 중인 강수량관측망은 낮은 밀도로 인하여 강우정보를 제공하는데 한계가 있다. 이를 개선하기 위해서는 더 많은 강우정보의 생산이 필요하다. 이와 같이 밀도 높은 강우 관측을 할 수 있는 방법 중에 하나는 사람들이 가장 많이 사용하는 차량을 이용하는 것이다. 본 연구의 목적은 강우센서와 강우량 사이의 관계를 해석하여 S (Sensor Signal) - R (Rainfall) 관계식을 개발하고 개발된 S-R 관계식을 이용하여 차량용 강우센서의 현장 적용성을 평가하는 것이다. 이를 위하여 인공강우발생장치가 있는 실험실에서 S-R 관계식을 개발하였으며, 5대의 차량에 강우센서를 부착하여 현장에서 강우 관측을 수행하였다. 그 결과 차량용 강우센서를 이용한 강우 관측의 가능성을 보여주었다.
Trans Abstract
Flood damage has been increasing due to the increase in local heavy rainfall. Rainfall data is very important to prevent flood damage. However, the precipitation network currently in operation provides limited rainfall data due to its low density. To improve this, more rainfall information needs to be produced. One of the ways to observe such dense rainfall is to use vehicles. The purpose of this study is to evaluate the application of rainfall sensors in the field by analyzing the relationship between rainfall sensor signals (S) and rainfall (R). Therefore, the S-R relationship was developed in the laboratory and rainfall observations were carried out in the field by attaching rain sensors to five vehicles. Results showed the possibility of observing rainfall using rainfall sensors on vehicles.
1. 서 론
오늘날 재해위험관리에 대한 국민적 관심이 매우 높아지고 있으며 이를 해결하기 위한 국가 차원의 많은 연구들이 진행되고 있다. 특히 강우에 대한 홍수 피해는 점차 증가하고 있다. 이는 이상기후 발생에 따른 태풍, 장마, 집중호우 등이 빈번하게 발생하고 있기 때문이다. 이와 같이 빠른 속도로 이동하는 태풍, 장기간에 걸쳐 이동하는 장마전선, 갑자기 발생하는 국지성 집중호우에서 내리는 강우는 재난예방에 매우 중요한 정보 이다. 하지만 현재 운영되고 있는 강수량관측소는 설치 운영 되는 지역만을 대표하는 기상정보를 제공하고 있다. 또한 집중호우로 인한 도로의 순간 침수는 교통문제와 인명 피해를 야기한다.
따라서, 이러한 문제를 개선하기 위해 더 많은 강우정보의 생산이 필요하다. 이러한 강우정보를 생산할 수 있는 방법은 사람들이 가장 많이 이용하는 휴대폰이나 차량일 것이다. 이러한 이동하는 매체에서 강우정보를 생산할 수 있다면 위치정보를 이용하여 고해상도의 강우정보를 제공할 수 있을 것이다. 하지만 휴대폰의 경우에는 위치정보 확인은 가능하지만 강우 발생시 휴대폰을 빗물에 노출시켜야 하는 한계가 있다. 따라서 강우 관측에 적합한 방법은 와이퍼 작동을 자동으로 조절할 수 있는 장치인 강우센서를 활용하면 가능할 것이다. 이와 같이 와이퍼 동작용 강우센서를 개선하여 강우계측을 할 수 있다면 전국 수 백만대의 차량이 강수량관측소가 됨으로 고해상도의 실시간 강우 관측을 할 수 있게 된다. 물론 차량용 강우센서의 강우 관측이 강수량관측소 만큼의 정확도는 나올 수 없을 것으로 생각되지만 다수의 정확도가 떨어지는 강우량계가 소수의 매우 정확한 강우량계보다 더 신뢰성 있는 강우정보를 제공할 수 있다(Haberlandt and Sester, 2010).
국외에서는 강우 관측 방법으로 위성을 이용한 관측 방법(Diop and Grimes, 2003), 마이크로파를 이용한 관측 방법(Upton et al., 2005), 라디오 주파수를 이용한 관측 방법(Leijnse et al., 2007), 음파를 이용한 관측 방법(De Jong, 2010) 등의 몇 가지 혁신적인 새로운 강우측정기술을 제시하고 있으나 고밀도의 이동성 강우정보를 생산하기에는 아직 한계가 있다. 이에 대한 개선 방법 중의 하나로 차량을 이용한 강우 관측 연구가 활발하게 진행되고 있다. 차량을 이용한 최근 연구로는 차량에 위성위치확인 시스템(Global Positioning System, GPS)을 장착하여 차량 위치와 와이퍼 작동 횟수를 기록하고 인근 강수량관측소에서 관측된 강우량과 와이퍼의 속도 변화에 따른 상관관계를 개발하였다(Haberlandt and Sester, 2010). 또한 강우 모의실험 장치를 제작하여 차량 유리에 2개의 강우센서를 부착하고 강우를 분사하였을 때 와이퍼의 속도 변화에 따른 강우센서 신호의 변화 값을 강우량의 지표로 사용하여 강우량 값을 측정하였다(Rabiei et al., 2013). 그러나 개발된 방법들에 대한 현장 적용이 이루어지지 않은 한계를 가지고 있다.
국내에서는 강우 관측 방법으로 초음파식 유량측정기술을 이용하여 강우량을 측정하는 방법을 개발하였고(Seo et al., 2013), 강우레이더를 이용한 이동성 강우정보를 생산하는 기술을 제시하였다(Kim et al., 2010). 하지만 강우레이더를 이용한 강우정보 생산은 해상도가 1 × 1 km로 도시지역에서의 고밀도 정보를 제공하기에는 부족한 면이 있다. 최근 국내에서도 차량을 이용한 강우 관측 연구가 진행되고 있다. 인공강우발생장치에서 분사되는 강우량의 변화에 따른 차량용 강우센서 신호의 변화 값을 분석하여 차량용 강우센서와 강우량의 관계를 이용한 강우 관측 방법을 제시하였다(Lee et al., 2017a, 2017b). 또한 차량용 강우센서와 인근 강수량관측소의 관측 값을 이용하여 비교⋅분석을 수행하였다(Lee et al., 2018). 이와 같이 다양한 공간에서 강우정보를 생산하기 위한 연구들이 지속적으로 수행되고 있고 이러한 최신 기술에 대한 수요도 증가하고 있다. 따라서 본 연구에서는 최근에 개발된 차량용 강우센서와 강우량 사이의 관계를 해석하여 Sensor Signal (S) - Rain-fall (R) 관계식을 개발하고 개발된 관계식을 이용하여 현장 적용성을 검토하고자 한다.
2. S-R 관계식 개발
2.1 연구방법
차량용 강우센서을 이용한 관계식 개발을 위하여 총 4단계에 절차로 구성하였다. 첫째, 인공강우발생 실험실 외부변수 인자 차단 및 강우센서 초기화 둘째, 인공강우발생장치를 이용한 강우센서 신호의 민감도 분석 셋째, S-R 관계식의 개발 및 검토 넷째, S-R 관계식을 적용한 강우센서의 현장적용성 평가이다. Fig. 1은 4단계 절차에 대한 순서도이다.
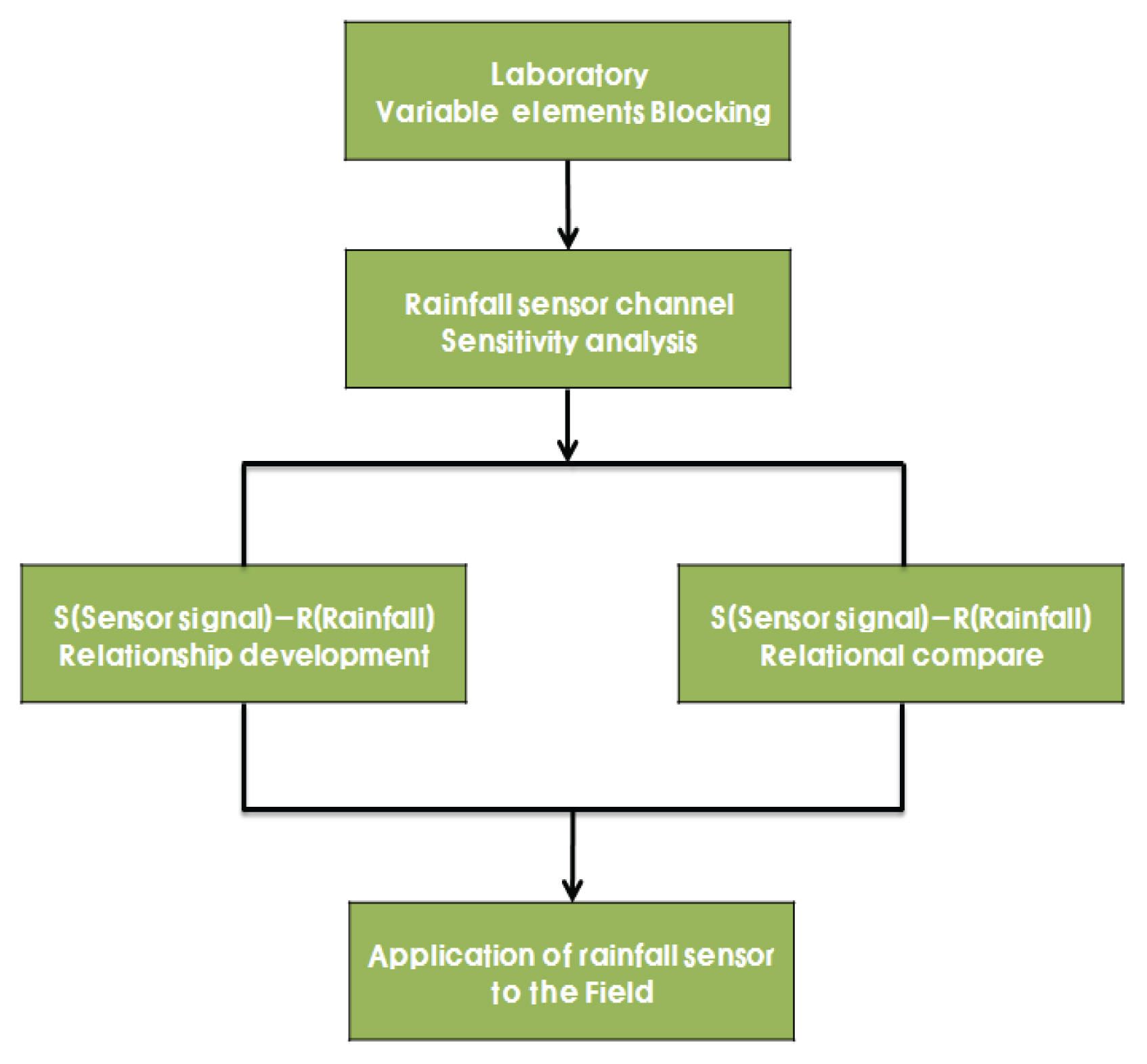
S-R Relationship Development Flow Chart
2.2 인공강우 실험실
강우센서 실험을 위하여 인공강우발생장치를 Fig. 2와 같이 제작하였다. 실험실의 주요 구성요소는 강우를 발생시키는 펌프와 노즐, 출력을 조절할 수 있는 인버터, 강우센서가 부착된 차량, 인공강우발생장치에서 발생하는 강우를 관측하기 위한 강수량계 등으로 구성되어 있다. 인공강우발생장치에 사용한 노즐은 Table 1에 제시하였고, 노즐 설치 현황은 Fig. 3에 나타내었다.
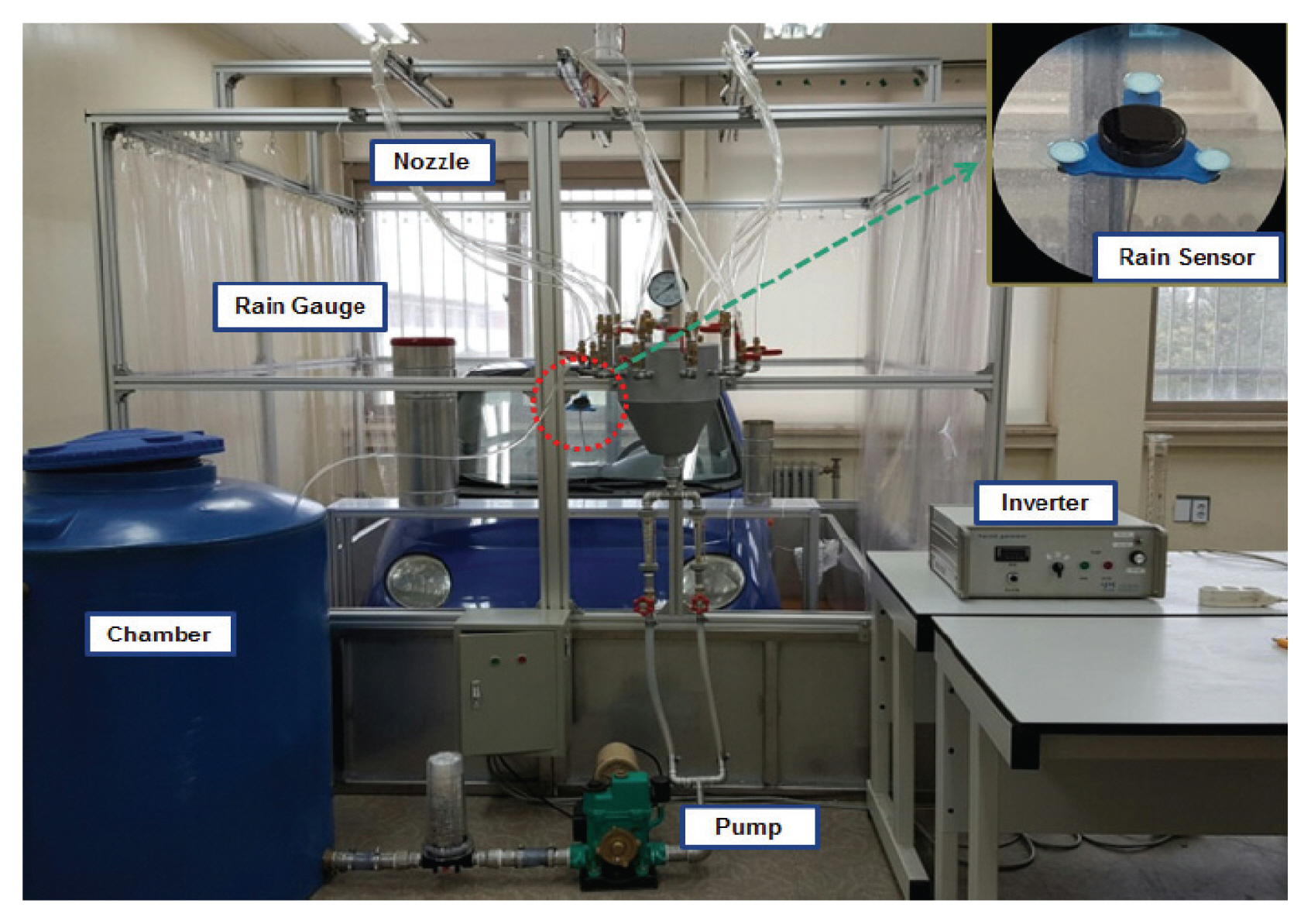
Artificial Rainfall Laboratory

Type of Nozzle
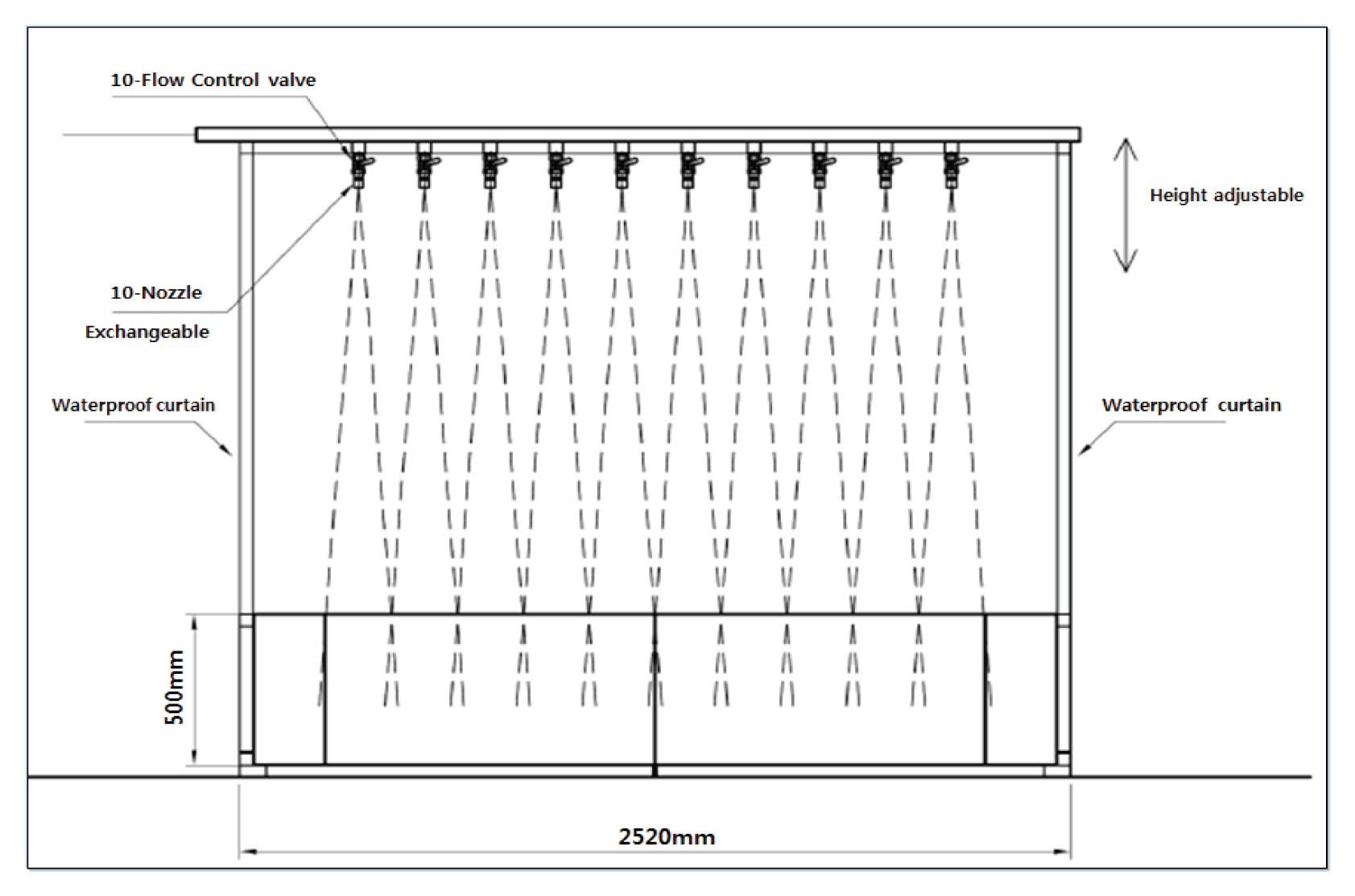
Nozzle Installation Status
또한 연속된 강우를 실험하기 위하여 부피 1 m3을 가지는 챔버를 이용하여 지속적으로 물을 공급 할 수 있도록 하였다.
하지만 노즐의 분사 위치에 따라 강우 분포가 다르게 나타나기 때문에 이에 대한 오차를 줄이기 위하여 강수량계를 이용하여 강우센서가 설치될 위치에서 인공강우 실험을 수행하고 실험에서 나온 값과 동일한 강우량 값이 발생하는 인근 위치에 강우량계를 설치하였다. 또한 저수조의 수두 저하에 따른 압력변화를 방지하기 위하여 인버터를 설치하여 일정한 압력으로 유량을 공급할 수 있도록 하였다.
2.3 차량용 강우센서
Fig. 4는 차량용 강우센서의 동작원리을 보여주고 있다. 본 연구에서 활용한 강우센서는 엑센도에서 개발한 센서로 프레넬 구조를 채용하고 발광 라볼릭 거울 모듈과 발광톱니형 프리즘을 갖는 광학 구조를 가지고 있다. Fig. 5는 개발된 강우센서의 구조도를 보여주고 있다.
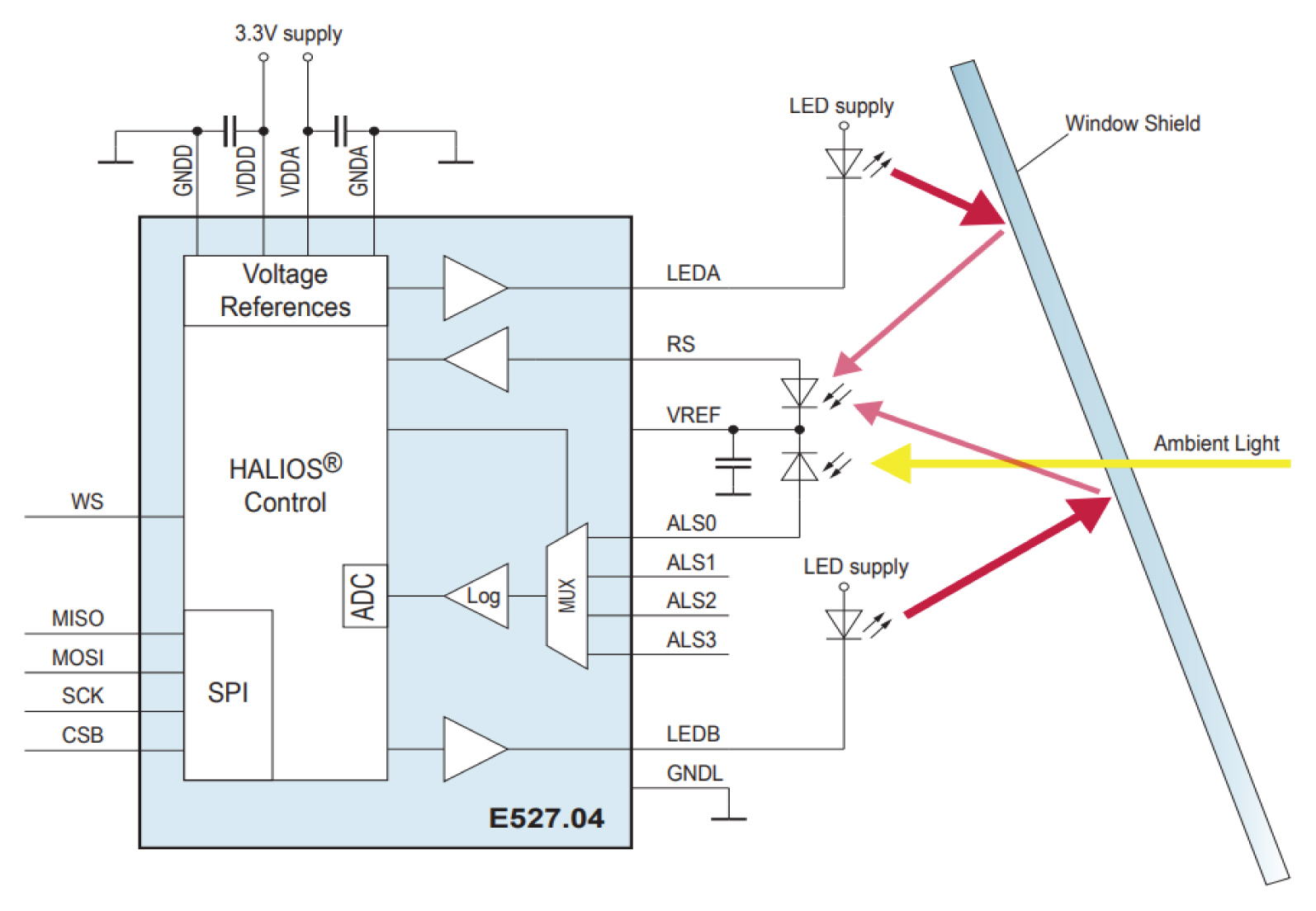
Principle of Operation of Rain Sensor (Elmos Semiconductor AG, 2017)
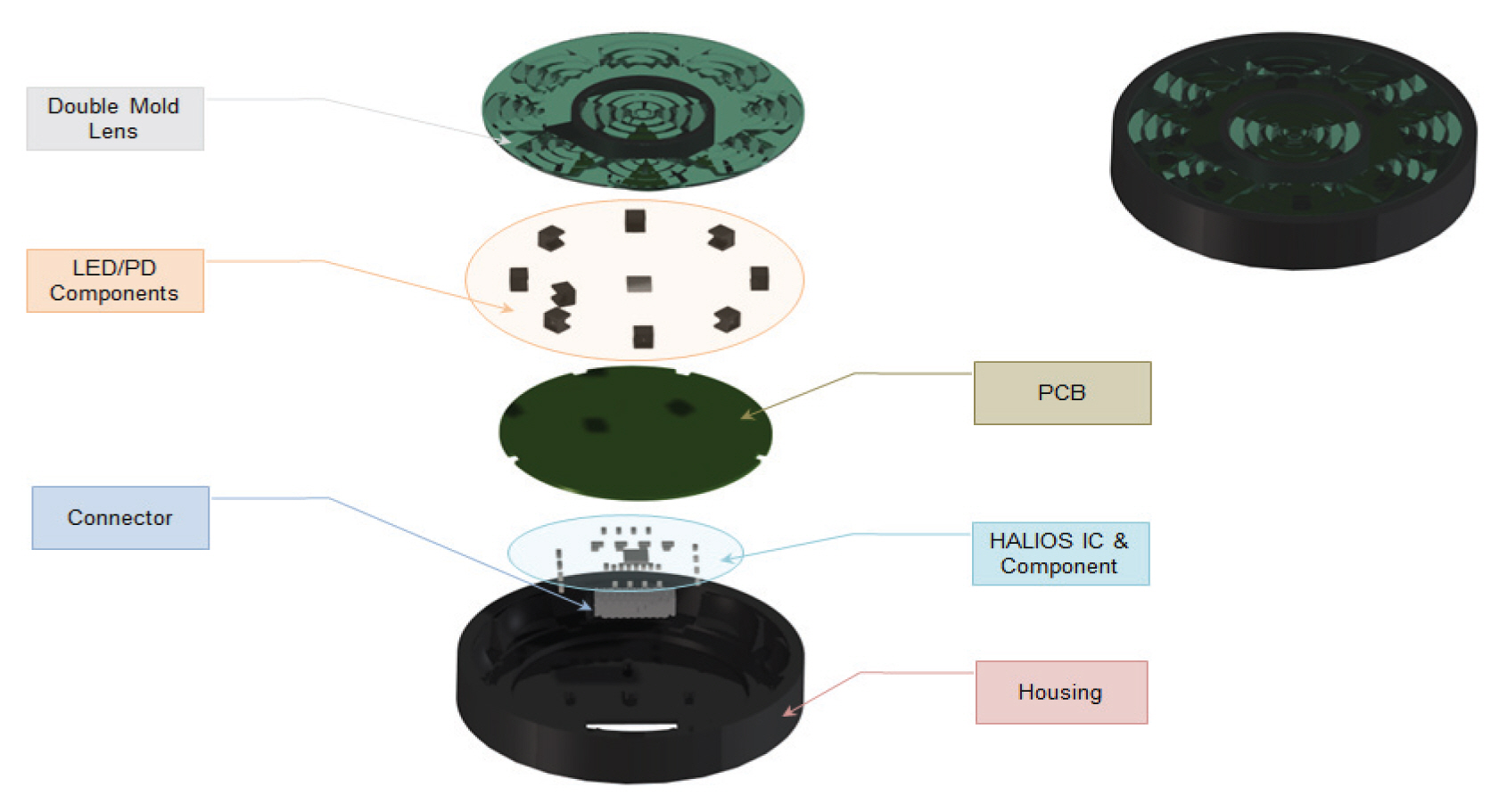
Assembly Structure of Rainfall Sensor
이와같이 개발된 강우센서의 작동 원리는 강우가 없는 경우에는 센서에서 송출된 신호가 모두 전반사 되어 수광부로 수신되고 강우가 있는 경우에는 전반사가 이루어지지 않아 수광부로 들어오는 신호가 줄어드는 방식이다.
2.4 S-R 관계식 개발
차량용 강우센서에서 송출되는 신호는 일정한 값을 지속적으로 유지 하는 것이 아니라, ±20 (무차원) 정도의 차이를 가지고 발생하기 때문에 짧은 시간에 관측이 이루어지는 경우 산포가 매우 크게 발생한다.
이런 노이즈와 이상치를 보정하는 작업이 필요하나 발생되는 수백만 개 이상의 자료에서 이상치를 제거하는 작업은 불가능하기 때문에 이상치를 포함한 자료의 안정화 시간이 필요하다. 본 연구에서는 이를 고려하여 5분 단위 관측 자료를 활용하여 실험하였다. 이는 기상청 및 환경부(한강, 낙동강, 영산강, 금강 홍수통제소)에서 제공하는 10분 단위 관측 자료와 비교를 위해서도 적절한 것으로 판단된다. 또한 인공강우실험실에서 재현할 수 있는 펌프 출력은 900 RPM ~ 1,400 RPM으로 각 100 RPM 단위로 실험하였다. Table 2는 펌프 출력에 따른 강수량계와 강우센서 신호의 관측값을 보여주고 있다. 관측한 값을 보면 동일한 실험 조건에서 관측 값의 변화가 발생하는 것을 볼 수 있는데 이와 같은 원인은 강우가 발생하는 노즐부터 강우센서까지 거리가 1 m 이내로 충분한 이격거리가 확보되지 않아 분사된 강우가 안정화되지 않기 때문에 발생하는 오차와 정화필터를 부착했음에도 나타나는 미세물질로 인한 노즐 분사량의 변화에 의해 발생하는 것으로 판단된다. 하지만 이러한 오차들은 인근에 설치한 강수량계를 이용하여 실측한 값을 활용하였기 때문에 관측된 자료는 타당한 것으로 판단된다. 이와 같은 실험 결과를 이용하여 Fig. 6과 같이 S-R 관계식(Eq. (1))을 개발하였다.
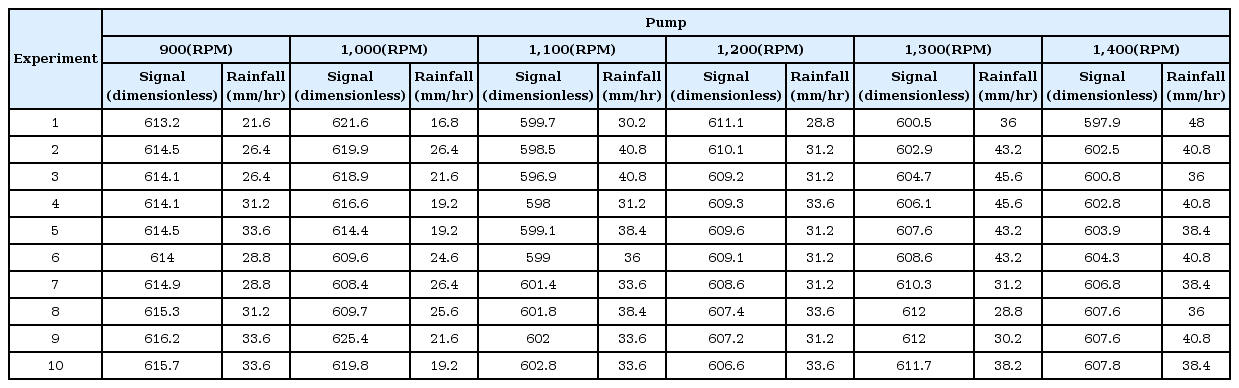
Observations of Rainfall Sensor Signals and Precipitation Based on Pump Output
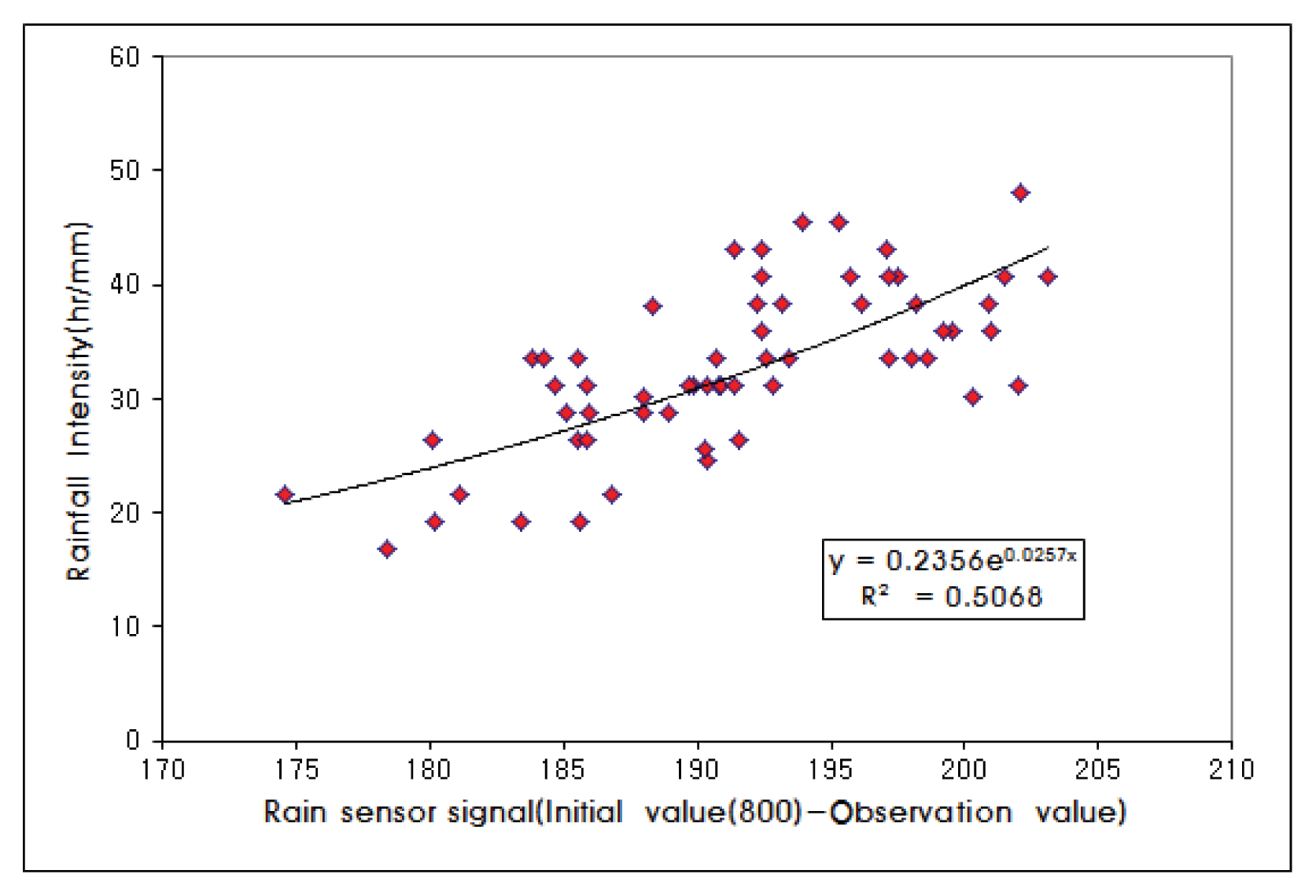
S-R Relationship Development
여기서, R은 강우강도(mm/hr), 800은 강우센서 신호(무차원) 초기값, S는 강우센서 신호(무차원) 관측 값이다.
개발된 S-R 관계식의 결정계수(R2)는 0.5068로 산정되었다. 실험결과에서 보면 강우강도가 약 28 mm/hr ~ 46 mm/hr 사이에서 높은 산포를 보이고 있는데 이는 강우실험에서 펌프의 출력과 노즐의 상태에 따라 발생하는 것으로 판단된다.
2.5 S-R 관계식 검토
개발된 S-R 관계식을 강우센서에서 관측된 신호 값에 적용하여 환산 강우량을 산정하고 강수량계에서 관측된 값과 비교하였다.
비교 결과는 Table 3에 제시하였다. 전체적으로 강수량계 대비 10% ~ 40%의 오차범위를 보이고 있으나 최대 80% 이상의 오차를 보이는 경우도 발생하였다. 왜냐하면 강우센서는 신호를 기반으로 관측하는 것으로 실제 강우량을 측정하는 강수량계에 비해 정확도는 일부 낮기 때문이다. 하지만 다수의 정확도가 떨어지는 강우센서가 소수의 정확한 강수량계보다는 공간적인 측면에서는 보다 신뢰성 높은 강우정보를 제공할 수 있다.

Review Results of S-R Relationship Through Compare
3. S-R 관계식 현장 적용
3.1 연구방법
실험실에서 개발된 S-R 관계식을 이용하여 현장 실험을 수행하였다. 이를 위하여 5대의 차량에 강우센서를 설치하였으며, 강우 발생시 실시간으로 강우관측을 수행하고 차량이 이동하는 경로에 위치한 강수량관측소 관측 자료를 이용하여 비교 분석을 수행하였다. Fig. 7은 개발된 S-R 관계식을 이용한 차량용 강우센서 현장 적용성 평가를 위한 분석절차를 보여주고 있다.
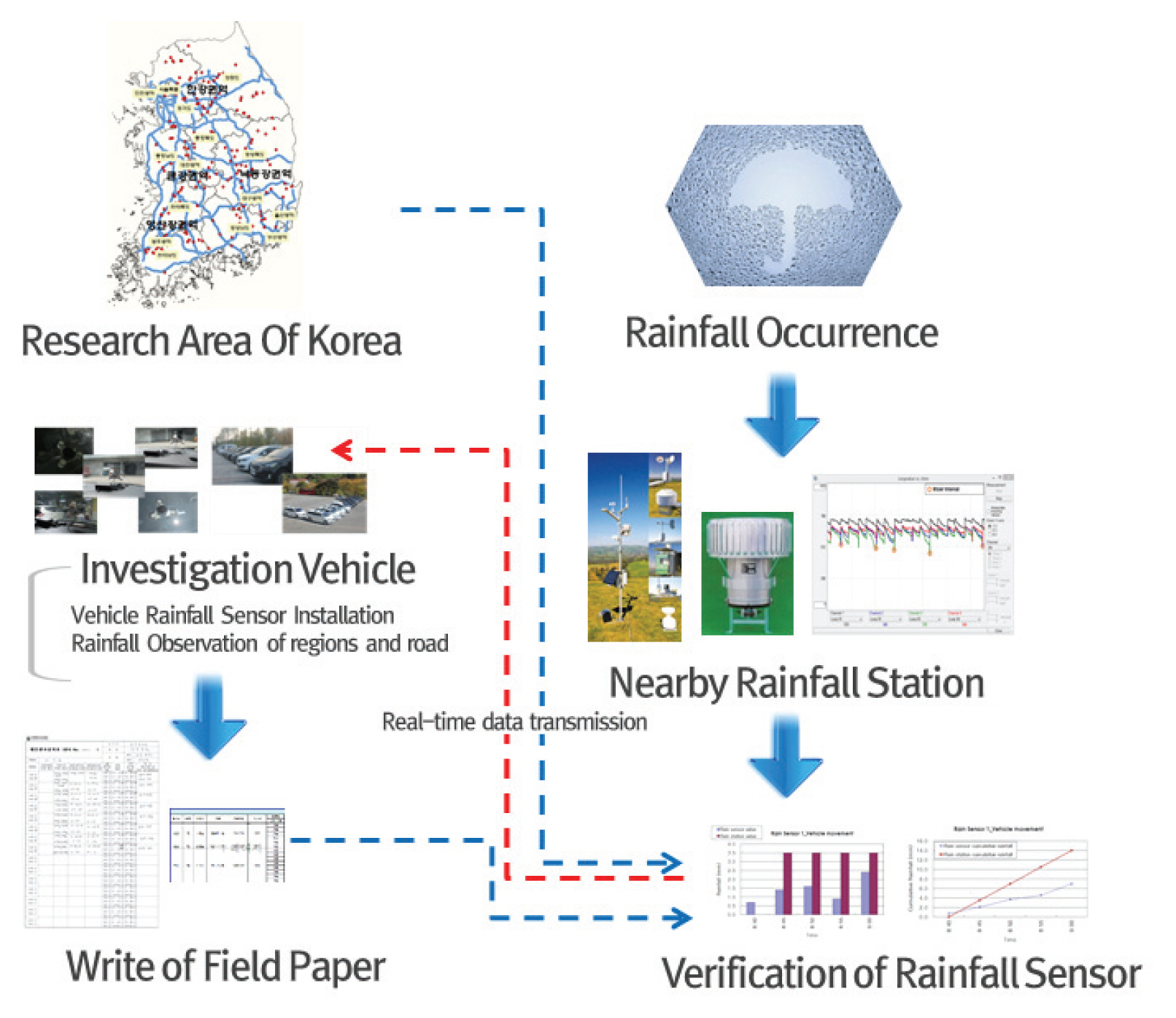
Field Application Method of Rainfall Sensor Flow Chart
3.2 연구지역
대한민국을 연구지역으로 선정하여 전국 단위의 강우관측을 수행하고 연구지역 내에서 운영하고 있는 정부기관의 강수량관측소(기상청, 환경부)를 활용하여 강우량 자료를 비교 분석 하였다. 차량용 강우센서의 운영 기간은 2017년 07월 01일부터 2018년 10월 31일까지 강우량 관측 자료를 수집하여 이용하였으며, 이중 차량용 강우센서에 의해 관측된 지점에서 가장 인근에 위치한 강수량관측소 60개소를 이용하여 비교 분석을 수행하였다. Fig. 8은 차량용 강우센서의 관측 위치를 보여주고 있다.
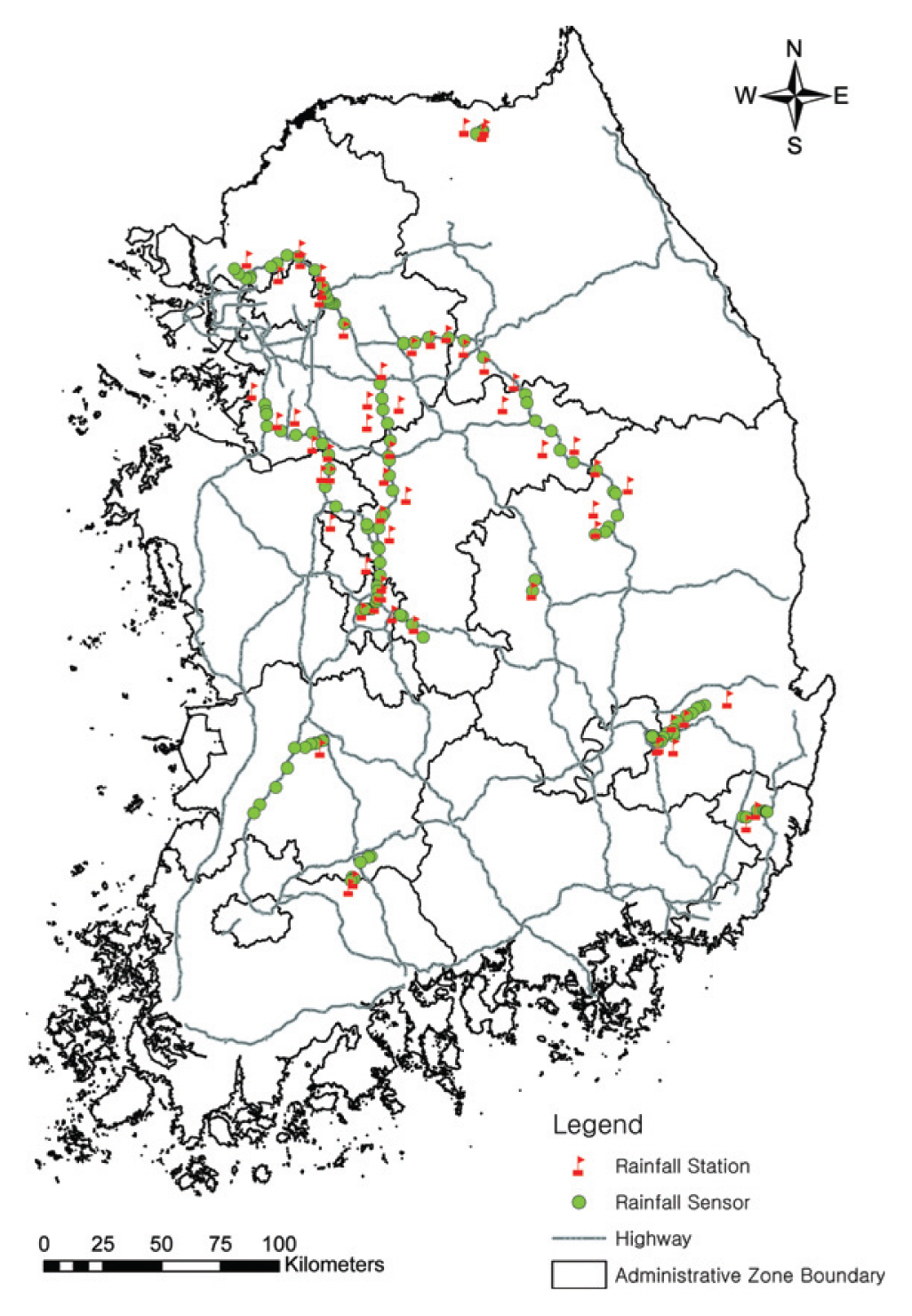
Observation Position of Rainfall Sensor and Rainfall Station
3.3 현장 적용 결과
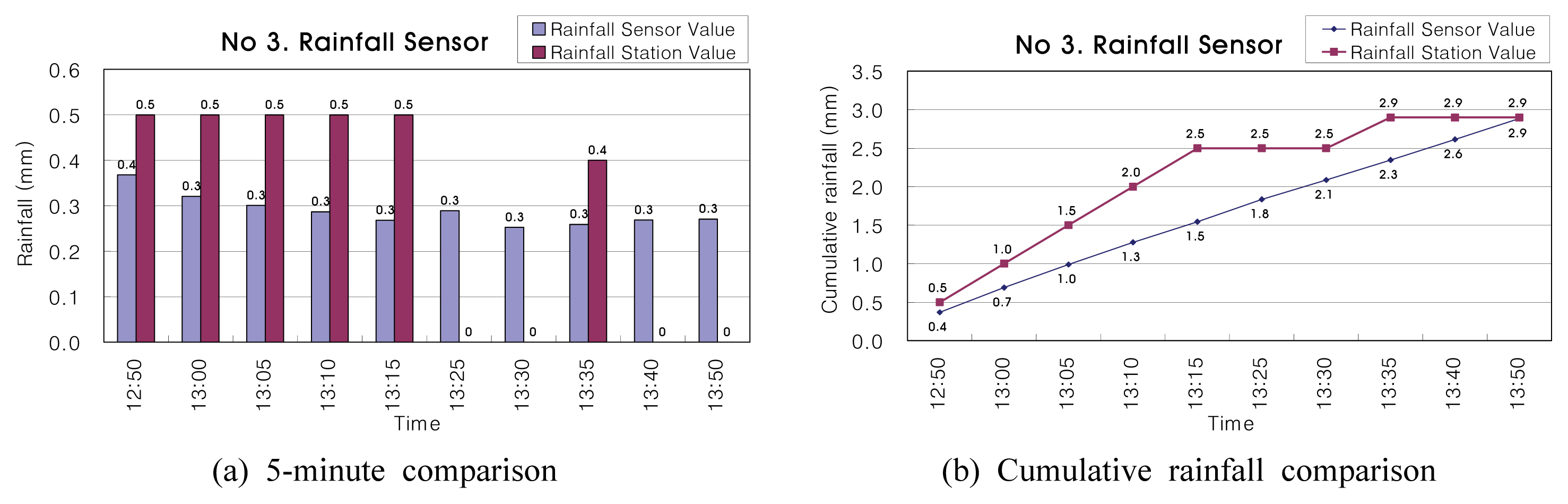
차량용 강우센서의 관측 자료의 적정성을 분석하기 위하여 인근 강수량관측소의 관측 데이터를 이용하여 비교 분석을 수행하였다. Figs. 9 ~ 13은 각 센서별 5분 단위 관측 자료와 동일 사상 기간 누적 강우 자료를 비교한 결과이다. 각 센서의 5분 단위 강우자료에서 차이를 보이고 있지만 이는 인근 강수량관측소의 위치와 차량의 이동에 따른 거리변화로 인하여 발생한 것이며 특히 관측 방법 및 위치에 따른 영향인 것으로 분석되었다.

Comparison of Rainfall Sensor and Rainfall Station Data (No 1.)

Comparison of Rainfall Sensor and Rainfall Station Data (No 2.)
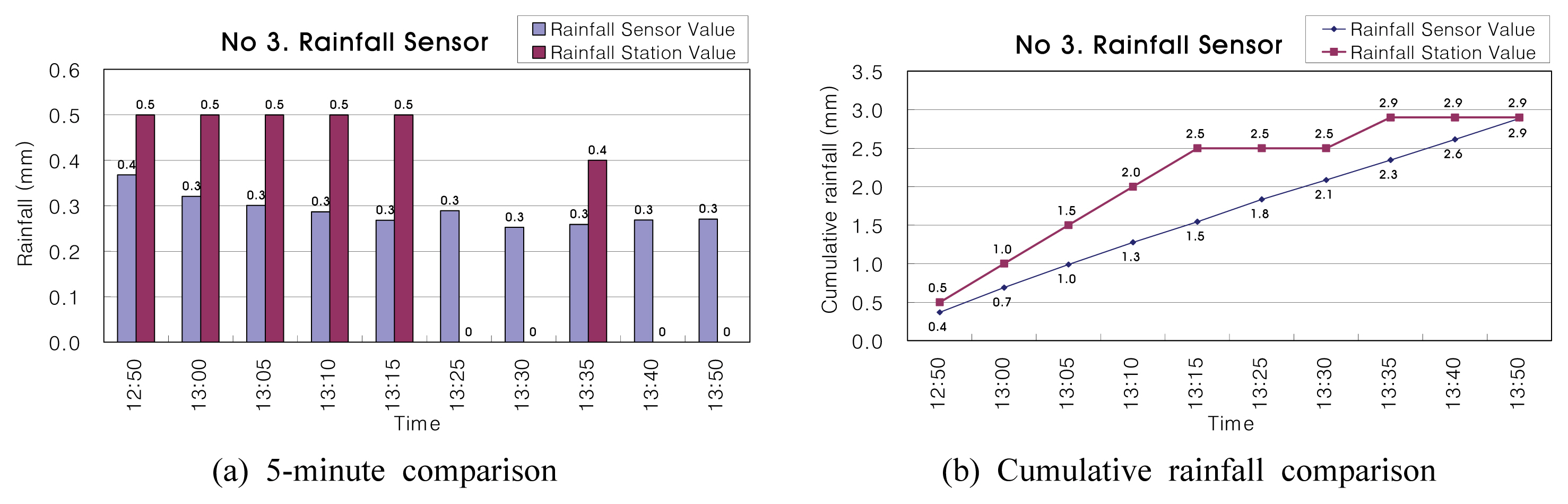
Comparison of Rainfall Sensor and Rainfall Station Data (No 3.)
Comparison of Rainfall Sensor and Rainfall Station Data (No 4.)
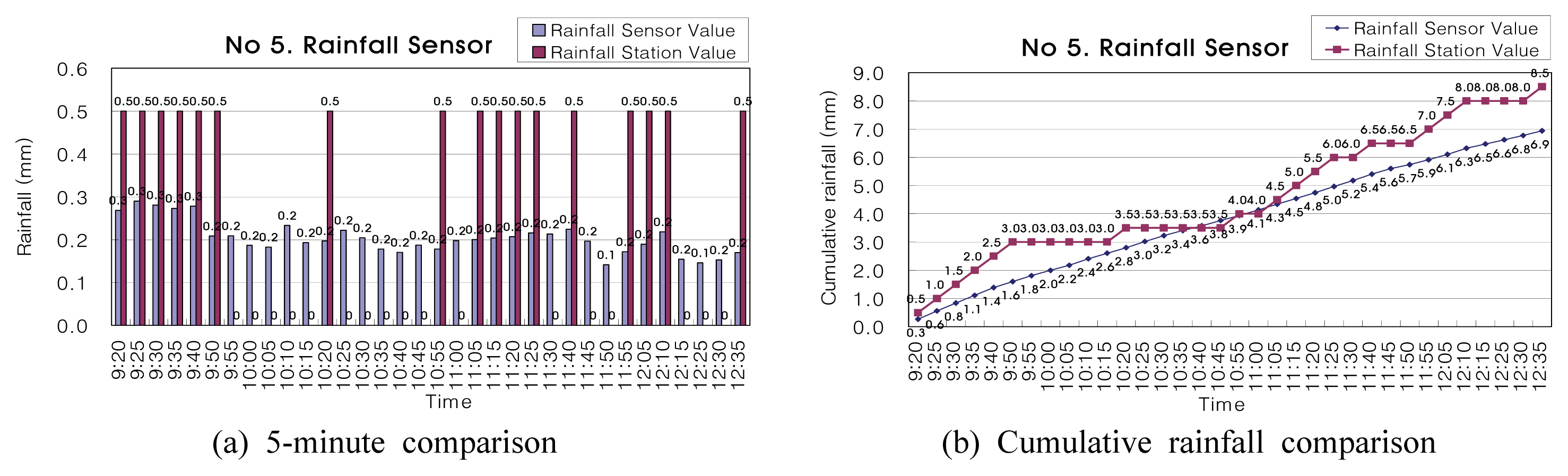
Comparison of Rainfall Sensor and Rainfall Station Data (No 5.)
각 센서별 누적 강우 비교 값을 보면 1번 센서(13.4 mm, 12.0 mm)에서는 강우사상 초기에 강우센서가 위치한 곳에서 국지성 집중호우가 발생한 것을 알 수 있다. 2번 센서(7.0 mm, 7.6 mm)에서는 강우사상 초기에 강수량관측소가 위치한 곳에서 국지성 집중호우가 발생한 것을 알 수 있다. 3번 센서(2.9 mm, 2.9 mm)에서 관측된 강우량은 0.3 mm ~ 0.5 mm로 매우 작은 강우로 관측지역에 고르게 분포했다는 것을 알 수 있다. 4번 센서(6.8 mm, 6.0 mm), 5번 센서(6.9 mm, 8.5 mm) 역시 매우 작은 강우로 관측 지역에 전체적으로 고르게 분포되어 있어 강우센서와 강우량관측 값이 유사하게 관측되었다. 즉 1번, 2번 강우센서의 경우에는 집중호우로 인하여 특정 위치 및 시간에서 높은 강우량을 보이고 있고 3번, 4번, 5번 센서에서는 고른 분포와 작은 강우로 인하여 유사한 관측 값을 보이는 것을 알 수 있다. Table 4는 각 강우사상에 따른 강우센서와 강수량관측소의 관측 값 차이를 보여주고 있다. 오차율을 보면 -23.2% ~ 10.4%의 범위를 가지고 있으면 평균 10.8%의 오차율이 발생하였다.

Observations and Errors of Rainfall Sensors and Rainfall Stations
4. 결 론
최근 재난에 대한 위험 의식이 점점 증가되고 있는 시점에서 국지성 집중호우에 의한 피해는 지속적으로 증가되고 있다. 이와 같은 홍수 피해를 저감하기 위한 대책 마련이 필요하다. 따라서 본 연구에서는 강우센서를 위한 S-R 관계식 개발 및 검증을 수행하고 차량용 강우센서 현장 적용성을 평가하였다. 현장 관측 결과에 따르면 차량용 강우센서 관측은 일부 부정확성을 내포하고 있지만 강수량관측소가 설치되어 있지 않은 도로 및 특정지역에 대해서 강우량 관측자료를 생산 할 수 있을 것으로 검토되었다. 또한 각 관측방법에 대한 강점을 혼용하여 사용한다면 보다 좋은 강우 관측을 할 수 있다. 본 연구를 통해 다음과 같은 결론을 도출하였다.
(1) 인공강우실험실 실험을 통하여 차량용 강우센서 신호와 강우량 사이의 관계를 분석하여 S-R 관계식을 개발하였다. 결정계수가 0.5068로 다소 작게 산정되었지만 비교⋅분석을 통하여 개발된 S-R 관계식의 타당성을 검토하였다.
(2) 현장 적용성 평가를 위해 차량용 강우센서와 강수량관측소의 관측 데이터를 5분 단위 시간으로 분석한 결과 일부 관측 자료에서 차이를 보이고 있었다. 이는 앞에서도 설명하였듯이 강우센서와 강수량관측소 관측 위치, 관측 방법, 차량의 이동 등의 원인에 의해 차이가 발생한 것이다.
(3) 현장 관측 자료를 보면 강우센서에서는 관측이 있었지만 강수량관측소에는 관측이 이루어지지 않은 기간들이 발생하고 있다. 이는 강수량관측소의 관측 기준이 10분 관측에 0.5 mm 이상일 경우에만 강우가 발생한 것으로 기록되기 때문이다. 하지만 강우센서의 경우 신호를 이용하여 S-R 관계식으로 강우량을 환산하기 때문에 적은 강우에서도 민감도가 높게 나타나는 특징을 보이고 있다.
(4) 또한, 누적 강우량 검토를 통하여 차량용 강우센서와 강수량관측소의 관측 자료를 검토한 결과 동일 사상에서 관측된 관측 값은 유사한 것으로 나타났다.
본 연구에서 제시한 결론을 종합하자면 차량용 강우센서를 이용하여 차량의 이동에 따른 강우 관측이 가능할 것으로 확인 할 수 있으며, 특히 강수량관측소가 설치되어 있지 않은 도로 및 특정지역에서는 보다 정확한 강우 관측을 할 수 있을 것이다. 그러나 보다 정교한 S-R 관계식을 개발을 위해서는 차량용 강우센서 개선, 인공강우실험실 안정화, 다양한 지역에서의 관측 등 추가적인 연구가 필요할 것으로 판단된다.
Acknowledgements
본 연구는 기상청의 기상⋅지진 See-At 기술개발연구/융합서비스기술(KMIPA 2017)의 지원으로 수행되었습니다.
