

1. žĄú Ž°†
žĶúÍ∑ľ 5ŽÖĄÍįĄ UAV (Unmanned Aerial Vehicle)Ž•ľ žĚīžö©Ūēėžó¨ Ū܆Ž™©, ÍĪīž∂ē, Žį©žě¨, žāįŽ¶ľ, žēąž†Ą, žł°ŽüČ, Í≥ĶÍįĄž†ēŽ≥ī Ž∂Ąžēľ ŽďĪ žāįžóÖž†ĄŽįėžĚė Žč§žĖĎŪēú Ž∂ĄžēľžóźžĄú UAVŽ•ľ žĚīžö©Ūēú Ž™®ŽčąŪĄįŽßĀžĚĄ žč§žčúŪēėÍ≥† žěąŽč§. Kim and Lee (2016)ŽäĒ Íįēžöį ŽėźŽäĒ žßĎž§ĎŪėłžöįŽďĪžúľŽ°ú žĚłŪēėžó¨ žāįžā¨ŪÉú ŽįŹ ŽĻĄŪÉąŽ©īžĚī Ž∂ēÍīīŽźėÍĪįŽāė žú†žč§ŽźėŽäĒ žā¨Ž°ÄÍįÄ ž¶ĚÍįÄŪēúŽč§Í≥† ŪēėžėÄŽč§. Lee et al. (2018)žĚÄ UAVŽ•ľ žĚīžö©Ūēėžó¨ ŽĻĄŪÉąŽ©īžĚė ÍĪįŽŹô Ž∂ĄžĄĚ žčúŪĖȞ̥ žúĄŪēī ŽĻĄŪÉąŽ©īŽāī Íłįž§Äž†ź žó≠Ūē†žĚĄ Ūē† žąė žěąŽäĒ ŪÉÄÍ≤ü ŪėēŪÉúžĚė Ž≥ÄžúĄ žł°ž†ēž†źžĚĄ ŽĻĄŪÉąŽ©ī Žāīžóź ž†úžěĎ žĄ§žĻėŪēėŽäĒ Žį©žēąÍ≥ľ žĚīŽ•ľ UAVžôÄ žóįÍ≥ĄŪēėžó¨ Ūôúžö©žĄĪžĚĄ ŽÜížĚīŽäĒ Žį©žēąžĚĄ ž†úžčúŪēėžėÄŽč§. G.H. Lee et al. (2020)žĚÄ žēĹ 20,000ÍįúžÜĆžóź žĚīŽ•īŽäĒ ž†ąŪ܆ ŽįŹ žĄĪŪ܆ ŽĻĄŪÉąŽ©īžóź ŽĆÄŪēú ž†źÍ≤ÄžĚÄ žĚłŽ†•žúľŽ°ú žĚīŽ£®žĖīžßÄÍ≥† žěąžúľŽāė, ž†źÍ≤Äžčú ž†úžēĹž°įÍĪīžúľŽ°ú žĚłŪēī ÍĶ¨ž≤īž†ĀžĚł ž°įžā¨žóź žĖīŽ†§žõÄžĚī žěąŽč§Í≥† ŪēėžėÄžúľŽ©į, UAVŽ•ľ žĚīžö©Ūē† Í≤Ĺžöį žĄ§Í≥Ą, žčúÍ≥Ķ, žú†žßÄÍīÄŽ¶¨ Ž∂ĄžēľžóźžĄú ÍīÄŽ¶¨ÍįźŽŹÖ ŽįŹ ž†źÍ≤ÄžĚė ž†ēŪôēŽŹĄŽ•ľ ŪĀ¨Í≤Ć ŪĖ•žÉĀžčúŪā¨ žąė žěąŽč§Í≥† ŪēėžėÄŽč§. Choi et al. (2016)žĚÄ žúĄžĄĪžóźžĄú ž†úžěĎŽźú DEM (Digital Elevation Model)žĚĄ žĚīžö©Ūēėžó¨ Ū܆žĄĚŽ•ė žúĄŪóėŽŹĄžóź ŽĆÄŪēú žóįÍĶ¨Ž•ľ žßĄŪĖČŪēėžėÄžúľŽ©į, S.J. Lee et al. (2020)žĚÄ žúĄžĄĪ žėĀžÉĀ ÍłįŽįėžĚė DTM (Digital Terrain Model)žĚĄ žĚīžö©Ūēú Žį©Ž≤ēŽ≥īŽč§ ŽďúŽ°† žėĀžÉĀžúľŽ°ú ž†úžěĎŽźú DTMžĚĄ žĚīžö©Ūēėžó¨ žąėžĻėŪēīžĄĚ ŪēėŽäĒ Í≤ÉžĚī Ū܆žĄĚŽ•ėžĚė žėĀŪĖ•Ž≤ĒžúĄ žėąžł°žóź ŽćĒ ž†Āž†ąŪēėŽč§Í≥† ŪēėžėÄŽč§. S.W. Lee et al. (2020)žĚÄ UAVŽ•ľ žĚīžö©Ūēėžó¨ ÍĪīž∂ēŽ¨ľŽÜížĚīŽ•ľ žāįž∂úŪēėžó¨ ÍĪīž∂ēŽ¨ľŽĆÄžě•žĚė ŽÜížĚīžôÄ ŽĻĄÍĶźŪēėžėÄÍ≥†, Kim et al. (2020)žĚÄ žú°žēąž°įžā¨ÍįÄ Ž∂ąÍįÄŽä•Ūēú Í≤Ĺžöį UAVŽ•ľ žĚīžö©Ūēėžó¨ žēąž†ĄžßĄŽč®žĚĄ ŪēėžėÄžúľŽ©į, Song et al. (2020)žĚÄ ŽďúŽ°†žĚĄ ŪÜĶŪēú Ūē≠Í≥Ķžā¨žßĄžł°ŽüČ ŪõĄ žč§ž†ú ŽįėžěÖ Ū܆Í≥ĶŽüČÍ≥ľ ŽďúŽ°†žĚĄ Ūôúžö©Ūēī žāįž†ēŽźú Ū܆Í≥ĶŽüȞ̥ ŽĻĄÍĶź Ž∂ĄžĄĚŪēėžėÄžúľŽ©į ž†Ąž≤ī Ū܆Í≥ĶŽüČžĚė ŽįėžěÖžė§žį®ŽäĒ 1.44% ŽįúžÉĚŪēėžėÄŽč§Í≥† ŪēėžėÄŽč§. Rau et al. (2015)žĚÄ žąėŽ™©, žú†Ž¶¨, Ž≤ĹŽ©ī, žßÄŽ∂ē, ŽŹĄŽ°ú, Í∑ł žôł ŽďĪžĚĄ Í≤Ĺžā¨žā¨žßĄžĚĄ žĚīžö©Ūēėžó¨ žÉĚžĄĪŽźú Í≥†ŽįÄŽŹĄžĚė ŪŹ¨žĚłŪäł ŪĀīŽĚľžöįŽďúŽ•ľ ŪÜĶŪēī Ž∂ĄŽ•ėŪēėžėÄŽč§.
UAV žł°ŽüČžĚė ž†ēŪôēŽŹĄ ŪĖ•žÉĀÍ≥ľ ÍīÄŽ†®Žźú žóįÍĶ¨Ž°ú GNSS (Global Navigation Satellite System)Ž•ľ ŪÉĎžě¨Ūēú UAVŽ°ú Ūē≠Í≥Ķžā¨žßĄžī¨žėĀ ŪõĄ žßÄžÉĀÍłįž§Äž†ź(Ground Control Point, GCP)žĚĄ žā¨žö©ŪēėžßÄ žēäÍ≥† Ž™®ŽćłŽßĀžĚĄ žßĄŪĖČŪē† Í≤Ĺžöį 2~8 mͳȞĚė žė§žį®Ž•ľ Ž≥īžėÄžúľŽāė GCPŽ•ľ žā¨žö©Ūēėžó¨ Ž™®ŽćłŽßĀŪē† Í≤Ĺžöį 10 cmͳȞĚė žė§žį®Ž•ľ ŪôēžĚłŪēėžėÄŽč§(Vallet et al., 2011; K√ľng et al., 2011). Í∑ľŽěė UAVžóź GNSS ŽŅźŽßĆ žēĄŽčąŽĚľ, RTK (Real Time Kinematic)žě•ŽĻĄŽ•ľ žě•žį©Ūēėžó¨ ŪĖ•žÉĀŽźú Í≥†ž†ēŽįÄžĚė žł°ŽüČžĚī ÍįÄŽä•Ūēú UAVÍįÄ žĚīžö©ŽźėÍ≥† žěąŽč§(Han and Hong, 2020). Stott et al. (2020)žĚÄ žī¨žėĀÍ≥†ŽŹĄ 70 mžóźžĄú 3,300ÍįúžĚė Í≤Äžā¨ž†ź(Check Point, CP)žĚĄ ŽĆÄžÉĀžúľŽ°ú GCPŽ•ľ 5Íįú žā¨žö©ŪēėžėĞ̥ ŽēĆžôÄ GCPŽ•ľ žā¨žö©ŪēėžßÄ žēäžēėžĚĄ ŽēĆ žú†žĚėŽĮłŪēú žį®žĚīÍįÄ ŽįúžÉĚŪēėžßÄ žēäŽäĒŽč§Í≥† ŪēėžėÄŽč§. ŪēúŪéł, ŽĻĄŪÉąŽ©īžĚė Í≥Ąžł° ŽįŹ žú†žßÄÍīÄŽ¶¨ Ž¨łž†úžóź žěąžĖīžĄú, ŪėĄŪĖČ 5 cmŽ•ľ žīąÍ≥ľŪēėŽäĒ ž†ēŪôēŽŹĄŽäĒ Ž∂ÄŪē©ŪēėžßÄ žēäžúľŽ©į, žĚīŽ≥īŽč§ ŽćĒžöĪ ž†ēŪôēŪēėÍ≥† ž†ēŽįÄŪēú Í≥Ąžł°žĚī ŪēĄžöĒŪēėŽč§. Nocerino et al. (2013)žĚÄ Í≥†ÍįÄžĚė žĻīŽ©ĒŽĚľÍįÄ žě•žį©Žźú UAVŽ•ľ žĚīžö©Ūēėžó¨ ž†ÄÍ≥†ŽŹĄ Ūē≠Í≥Ķžā¨žßĄžī¨žėĀžĚĄ žč§žčúŪēėžėÄŽč§. Í∑ł Í≤įÍ≥ľ 5 mm žĚīŽāīžĚė ž†ēŪôēŽŹĄŽ•ľ ÍįĞߥ DEMžĚĄ žÉĚžĄĪ Ūē† žąė žěąŽč§Í≥† ŪēėžėÄŽč§.
„ÄéžĚľŽįėžł°ŽüČ žěĎžóÖÍ∑úž†ē„ÄŹžóź ŽĒįŽ•īŽ©ī ŽĻĄŪÉąŽ©īžĚė ž†ąž∑® Í≥Ķžā¨ žčú ŪĎúÍ≥†žóź ŽĆÄŪēú Ūóąžö© ŪĎúÍ≥† žė§žį®ŽäĒ 3 cm žĚīŽāīžó¨žēľ ŪēėŽ©į, ŽāėžēĄÍįÄ ŽćĒžöĪ ž†ēŪôēŪēú Íłįž§ÄžĚł ŽĻĄŪÉąŽ©īžĚė Ž≥ÄžúĄ Í≥Ąžł° ž†ēŪôēŽŹĄŽäĒ 5 mm žĚīŽāīžó¨žēľ ŪēúŽč§Í≥† Í∑úž†ēŪēėÍ≥† žěąŽč§. Í∑łŽü¨ŽĮÄŽ°ú Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ žč§žö©ŪôĒÍįÄ žö©žĚīŪēú žĻīŽ©ĒŽĚľ žĚľž≤īŪėē UAVŽ•ľ žĚīžö©Ūēėžó¨ Ū܆Ž™©Í≥Ķžā¨žö©žúľŽ°ú žā¨žö©Ūē† žąė žěąŽäĒ ž†ēŪôēŽŹĄ 3 cm žĚīŽāīžĚė žĄĪÍ≥ľŽ•ľ ŪôēŽ≥īŪēėÍ≥†, žßÄŽįėÍ≥Ąžł° žĄ§Í≥ĄÍłįž§ÄžúľŽ°ú žā¨žö©ŽźėŽäĒ ŽĻĄŪÉąŽ©īžĚė Ž≥ÄžúĄ Íłįž§ÄžĚł 5 mm žĚīŽāīžĚė ž†ēŪôēŽŹĄŽ•ľ žĖĽžĚĄ žąė žěąŽäĒžßÄžóź ŽĆÄŪēú žóįÍĶ¨Ž•ľ žßĄŪĖČŪēėÍ≥†žěź ŪēúŽč§.
2. žč§Ūóė Žį©Ž≤ē
žóįÍĶ¨ŽĆÄžÉĀžßÄžó≠žĚÄ Í≤ĹÍłįŽĆÄŪēôÍĶź ÍĶźŽāīžĚė ŽĻĄŪÉąŽ©īžĚĄ ŽĆÄžÉĀžúľŽ°ú ŪēėžėÄžúľŽ©į, Ž©īž†ĀžĚÄ žēĹ 7,100 „é°žĚīŽč§. žī¨žėĀžĚÄ 2020ŽÖĄ 12žõĒ 27žĚľ žė§ž†Ą 11žčúžóź žī¨žėĀŪēėžėÄŽč§. ŪēīŽčĻžßÄžó≠žĚÄ žąėŽ™©žĚī ŽĻĄÍĶźž†Ā ž†ĀžúľŽ©į, žÜƎ讞Ěī žĄ§žĻėŽźú 3ÍįúžĚė ŽĻĄŪÉąŽ©īžĚīŽč§. ÍįĀ ŽĻĄŪÉąŽ©īžĚė ŽÜížĚīŽäĒ žēĹ 3.5 mžĚīŽ©į, ŽĻĄŪÉąŽ©īžĚė ÍłįžöłÍłįŽäĒ žēĹ 1:0.8žĚīŽč§. žóįÍĶ¨ŽĆÄžÉĀžßÄžó≠žĚÄ ÍĶįÍīÄŽ†® Í≥ĶŪē≠žĚī žěąŽäĒ ÍīÄž†úÍ∂Ćžóź ŪŹ¨Ūē®Žźú Í≥Ķžó≠žĚīŽĮÄŽ°ú ŽĻĄŪĖČžäĻžĚł ŽįŹ Ūē≠Í≥Ķžā¨žßĄžī¨žėĀ ŪóąÍįÄŽ•ľ ŽįõžēėŽč§. Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ DJIžā¨žĚė Phantom4 RTKŽ•ľ žĚīžö©Ūēėžó¨ žī¨žėĀÍ≥†ŽŹĄŽäĒ AGL (Above ground level) 25 m, ŽĻĄŪĖČžÜ掏Ą 2 m/s žī¨žėĀÍįĀŽŹĄ 60ňö Ūö°, žĘÖž§ĎŽ≥ĶŽŹĄ 80%Ž°ú žī¨žėĀŪēėžėÄŽč§. žā¨žö©Žźú UAV ŽįŹ žĻīŽ©ĒŽĚľžĚė ž†úžõźžĚÄ Table 1Í≥ľ ÍįôŽč§.
Table 1
Specifications of UAV and Camera
Ūē≠Í≥Ķžā¨žßĄ žī¨žėĀ ŪõĄ ŪĎúž†ē ŽįŹ ŽŹĄŪôĒŽ•ľ žč§žčúŪēėÍłį žúĄŪēī žĶúžÜĆ 3ž†ź žĚīžÉĀžĚė žßÄžÉĀÍłįž§Äž†źžĚī ŪēĄžöĒŪēėŽč§. Í∑łŽü¨ŽĮÄŽ°ú GNSS žě•ŽĻĄŽ•ľ žĚīžö©Ūēėžó¨ žßÄžÉĀÍłįž§Äž†ź žł°ŽüȞ̥ žč§žčúŪēėžėÄÍ≥† žĚīŽēĆ žā¨žö©Žźú žě•ŽĻĄžĚė ž†úžõźžĚÄ Table 2žôÄ ÍįôŽč§.
Table 2
Specification of GNSS Receiver
GNSSžł°ŽüČ Í≤įÍ≥ľŽäĒ Table 3Í≥ľ ÍįôžúľŽ©į, žąėŪŹČ 0.83 cm, žąėžßĀ 1.73 cm ŽįŹ PDOP (Positional Dilution of Precision) 1.87Ž°ú Í≥Ąžł°ŽźėžĖī „ÄéžĚľŽįėžł°ŽüČ žěĎžóÖÍ∑úž†ē„ÄŹžĚė ŽĄ§ŪäłžõĆŪĀ¨ RTK žł°ŽüČ Í∑úž†ē ž§Ď Ūóąžö© ž†ēŽįÄŽŹĄ Í∑úž†ēžĚł žąėŪŹČ 5 cm žąėžßĀ 10 cm ŽįŹ PDOP 3 žĚīŪēėŽ•ľ ŽßĆž°ĪŪēėžėÄŽč§. Kim et al. (2018)žĚė žóįÍĶ¨Í≤įÍ≥ľžóź ŽĒįŽĚľ žßÄžÉĀÍłįž§Äž†źžĚĄ ŽĆÄžÉĀžėĀžó≠Í≥ľ Í≤Äžā¨ž†źžĚė žôłÍįĀžėĀžó≠žóź 3ž†źžĚĄ ŽįįžĻėŪēėžėÄŽč§.
Table 3
GNSS Survey Results
| Name | NX (m) | EY (m) | Elev (m) |
|---|---|---|---|
| GCP1 | 522,556.900 | 203,118.590 | 112.950 |
| GCP2 | 522,548.410 | 203,210.170 | 100.470 |
| GCP3 | 522,508.330 | 203,204.910 | 105.420 |
UAVžĚė ŽĻĄŪĖČÍ≤ĹŽ°úŽäĒ DJIžā¨žĚė ž†Ąžö© žĽ®Ū䳎°§Žü¨Ž•ľ žĚīžö©Ūēėžó¨ žěźŽŹôžúľŽ°ú žĄ§ž†ēŪēėžėÄŽč§. Fig. 1žĚÄ žßÄžÉĀÍłįž§Äž†ź(ž†ĀžÉČ)Í≥ľ Í≤Äžā¨ž†ź(ŪĆĆŽěÄžÉČ)žĚĄ ŽāėŪÉÄŽāīŽ©į Fig. 2ŽäĒ UAVžĚė ŽĻĄŪĖČÍ≤ĹŽ°úŽ•ľ ŽāėŪÉÄŽāłŽč§.


Í≤Äžā¨ž†źžúľŽ°ú žā¨žö©ŽźėŽäĒ ŽĆÄÍ≥ĶŪĎúžßÄŽäĒ „ÄéžßÄŽįėÍ≥Ąžł° žĄ§Í≥ĄÍłįž§Ä„ÄŹžóź Ž™ÖžčúŽźėžĖī žěąŽäĒ žĚīŽŹôžł°ŽüČ ŽßźŽö̞̥ žĚīžö©ŪēėžėÄžúľŽ©į, ž†úžõźžĚÄ Table 4žôÄ ÍįôŽč§.
Table 4
Check Point Specifications
| Wood Pile | |
|---|---|
| Length | 35 cm |
| Dimeter | 3.5 cm |
| Material | Wood |
| Weight | 250 g |
| Compressive strength | 400 kgf/cm2 |
ŽßźŽöĚ ŽĎźŽ∂Äžóź Fig. 3Í≥ľ ÍįôžĚī SOKKIAžā¨žĚė Žįėžā¨žčúŪ䳎•ľ Ž∂Äžį©ŪēėžėÄÍ≥† ŽßźŽöĚžĚÄ žßÄŽįėžúľŽ°úŽ∂ÄŪĄį 25 cm žĚīžÉĀžĚė Í∑ľžěÖÍĻäžĚīŽ•ľ ÍįĖŽŹĄŽ°Ě žĄ§žĻėŪēėžėÄŽč§.

Ū܆ŪÉąžä§ŪÖĆžĚīžÖėžĚÄ SOKKIAžā¨žĚė SET330RK3žĚĄ žā¨žö©ŪēėžėÄÍ≥†, ÍĪįŽ¶¨žł°ž†ēžĚė ž†ēŽįÄŽŹĄŽäĒ ¬Ī3 mm+3 ppm, ÍįĀžł°ž†ēžĚė ž†ēŽįÄŽŹĄŽäĒ ¬Ī1‚ÄĚžĚīŽč§. GNSSŽ•ľ žĚīžö©Ūēėžó¨ žł°ŽüČŽźú 3ž†źžóź ŪĒĄŽ¶¨ž¶ėžĚĄ žĄ§žĻėŪēėÍ≥† ŪõĄŽį©ÍĶźŪöĆŽ≤ēžĚĄ žĚīžö©Ūēėžó¨ Ū܆ŪÉąžä§ŪÖĆžĚīžÖėžĚė žĘĆŪĎúŽ•ľ žĖĽžóąžúľŽ©į X, Yžė§žį®ŽäĒ žĶúžÜĆž†úÍ≥ĪŽ≤ēžúľŽ°ú Í≥ĄžāįŽźėžĖī ÍįĀÍįĀ 3.9 mm, 3.0 mmŽ°ú ŪôēžĚłŽźėžóąŽč§. Zžė§žį®ŽäĒ ŪŹČÍ∑†žĻėŽ•ľ ÍįÄž§ĎŪēėžó¨ žĄ§ž†ēŽźėÍłį ŽēĆŽ¨łžóź, Ž≥ĄŽŹĄžĚė ž†ēŽįÄŽŹĄŽ•ľ ŪôēžĚłŪē† žąėŽäĒ žóÜžóąŽč§. ŪĒĄŽ¶¨ž¶ėžĚė ž†ēŪôēŽŹĄŽäĒ ¬Ī(2+2 ppm √ó D) mmžĚīŽ©į žė§ŪĒĄžÖč Íįí(offset)žĚÄ ‚Äď30 ppmžĚīÍ≥†, Žįėžā¨žčúŪäłžĚė ž†ēŪôēŽŹĄŽäĒ ¬Ī(4+3 ppm √ó D) mmžĚīŽč§. ÍīÄžł°ŽčĻžčú Íłįžė®žĚÄ ‚Äď10 ¬įCžĚīžėÄÍ≥† ÍłįžēēžĚÄ 1,030 hPažĚīžėÄžúľŽ©į Ž™®Žď† Í≤Äžā¨ž†źÍ≥ľ Ū܆ŪÉąžä§ŪÖĆžĚīžÖėžĚė ÍĪįŽ¶¨ŽäĒ 70 m žĚīŽāīžėÄŽč§. Ū܆ŪÉąžä§ŪÖĆžĚīžÖėžĚĄ žĚīžö©Ūēėžó¨ ŽßźŽöĚ ŽĎźŽ∂Äžóź žĄ§žĻėŽźú žčúŪäł ž§Ďžēô ÍįížĚĄ ÍīÄžł°Ūēú žł°ŽüČÍ≤įÍ≥ľŽäĒ Žč§žĚĆ Table 5žôÄ ÍįôŽč§.
Table 5
CP Results (Total Station)
Network RTK žā¨žö© žčú UAVžóźžĄú žąėžč†Žźú žīąÍłį žĘĆŪĎúŽäĒ WGS84žÉĀžĚė Í≤ĹžúĄŽŹĄžôÄ ŪÉÄžõźž≤īÍ≥†žĚė ž†ēŽ≥īŽ•ľ ŪÜĶŪēėžó¨ žĖĽžĖīžßÄŽĮÄŽ°ú, žĚīŽ•ľ Í∑łŽĆÄŽ°ú žā¨žö©Ūē† Í≤Ĺžöį ž†ēŪôēŽŹĄ Ž∂ĄžĄĚžóźžĄú Í≤Äžā¨ž†źžóź ŽĆÄŪēú ŽÜížĚī Ūéłžį®ÍįÄ 23 mÍįÄŽüČ ŽāėŪÉÄŽāėÍ≤Ć ŽźúŽč§. Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ ÍĶ≠Ū܆žßÄŽ¶¨ž†ēŽ≥īžõźžĚė KNGeoid14Ž•ľ žĚīžö©Ūēėžó¨ žĚīŽ•ľ Ž≥īž†ēŪēėžėÄŽč§. Ūē≠Í≥Ķžā¨žßĄžł°ŽüȞ̥ žúĄŪēīžĄúŽäĒ ŪĎúž†ēžěĎžóÖžĚī žĚīŽ£®žĖīž†łžēľ ŪēėŽ©į žī¨žėĀ ŽčĻžčú žĻīŽ©ĒŽĚľžĚė ž∂ēž≤ôÍ≥Ąžąė, 3žį®žõź žĘĆŪĎú, 3ž∂ēžĚė Ž≥ÄŪôĒŽüČžĚī ŪēĄžöĒŪēėŽč§. Phantom4 RTKŽ•ľ žĚīžö©Ūēėžó¨ Ūē≠Í≥Ķžā¨žßĄžī¨žėĀ žčú, ÍįĀ žā¨žßĄŽßąŽč§ ÍłįŽ°ĚŽźú 7ÍįúžĚė žĚłžěźŽ•ľ žĚīžö©Ūēėžó¨ ŪĎúž†ēžěĎžó̥֞ žßĄŪĖČŪē† žąė žěąŽč§. ŽĻĄŪÉąŽ©īžĚė 3D žúĄžĻėž†ēŪôēŽŹĄ ŪŹČÍįÄŽ•ľ žúĄŪēī Pix4DmapperŽ•ľ žā¨žö©ŪēėžėÄžúľŽ©į, ŪĒĄŽ°úÍ∑łŽě®žóźžĄú Ž≤ąŽď§ ŽłĒŽ°Ě ž°įž†ēŽ≤ē(Bundle Block Adjustment)žĚĄ žč§žčúŪēėžėÄŽč§. Žß§žĻ≠ žėĶžÖėžĚÄ ŪĒĄŽ°úÍ∑łŽě®ŽāīžóźžĄú ÍłįŪēėŪēôž†ĀžúľŽ°ú ž†ēžĚėŽźú Žß§žĻ≠ ÍłįŽä•žĚĄ žā¨žö©ŪēėžėÄŽč§. Í≥ĄžāįŽźú ŪŹČÍ∑† GSDŽäĒ 0.59 cmŽč§.
3. žč§Ūóė Í≤įÍ≥ľ
3.1 RTK
Network RTKŽ•ľ žĚīžö©Ūē† Í≤Ĺžöį ÍĶ≠Ū܆žßÄŽ¶¨ž†ēŽ≥īžõźžóźžĄú ž†úÍ≥ĶŪēėŽäĒ VRS (Vertual Reference Station)ž†úÍ≥Ķ žā¨žĚīŪäłžóź ž†ĎžÜćŪēėžó¨žēľ ŪēúŽč§. Ž≥ł žóįÍĶ¨žóźžĄú ÍłįžßÄÍĶ≠žĚÄ ÍĶ≠Ū܆žßÄŽ¶¨ž†ēŽ≥īžõźžóź žúĄžĻėŪēú SUWN-RTCM31žĚĄ žā¨žö©ŪēėžėÄŽč§. Phantom4 RTKŽ•ľ žĚīžö©Ūēėžó¨ žīĚ 172žě•žĚė žā¨žßĄžĚĄ ž∑®ŽďĚŪēėžėÄžúľŽ©į, žī¨žėĀ ŽčĻžčú žā¨žßĄžóź ŽĆÄŪēú žúĄžĻėžĘĆŪĎú ŽįŹ žąėŪŹČ, žąėžßĀ ž†ēŪôēŽŹĄÍįÄ ÍłįŽ°ĚŽźúŽč§. ž∑®ŽďĚŽźú žā¨žßĄžĚė ŪŹČÍ∑† žąėŪŹČž†ēŽįÄŽŹĄŽäĒ 1.33 cmžėÄžúľŽ©į, žąėžßĀž†ēŽįÄŽŹĄ 2.45 cmžėÄŽč§. žóįÍĶ¨ŽĆÄžÉĀžėĀžó≠Í≥ľ ÍłįžßÄÍĶ≠Í≥ľžĚė ÍĪįŽ¶¨ŽäĒ žēĹ 3.5 kmžĚīžóąžúľŽ©į Network RTKŽ•ľ žā¨žö©Ūēėžó¨ ž†ēŪôēŽŹĄ Ž∂ĄžĄĚžĚĄ žč§žčúŪēėžėÄŽč§(Tables 6~8).
Table 6
GCP Aerial Triangulation Results
Table 7
Residuals of CPs with and without GCPs
Table 8
RMSEs with and without GCPs
| RMSE (mm) with GCPs | RMSE (mm) without GCPs | ||||
|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z |
| 5.035 | 7.005 | 7.664 | 32.986 | 5.718 | 9.499 |
Table 6žĚÄ žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēú Ūē≠Í≥Ķžā¨žßĄžł°ŽüČžĚė žį®žĚīÍįížĚĄ ŽāėŪÉÄŽāīžóąžúľŽ©į, Table 7žĚÄ 12ÍįúžÜĆžĚė Í≤Äžā¨ž†źÍ≥ľ Ūē≠Í≥Ķžā¨žßĄžł°ŽüČžĚė žį®žĚīÍįížĚĄ ŽāėŪÉÄŽāīŽāłŽč§. žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēú Í≤Ĺžöį žĶúŽĆÄ 13 mmžĚė žė§žį®ÍįÄ ŽįúžÉĚŪēėžėÄžúľŽ©į, žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©ŪēėžßÄ žēäžĚÄ Í≤Ĺžöį žĶúŽĆÄ 38 mmžĚė žė§žį®ÍįÄ ŽįúžÉĚŪēėžėÄŽč§. Table 8žĚÄ Í≤Äžā¨ž†źžĚė ŪŹČÍ∑† RMSEŽ•ľ X, Y, ZžĄĪŽ∂ĄžúľŽ°ú ÍįĀÍįĀ ŽāėŪÉÄŽāīžóąžúľŽ©į, žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēú Í≤Ĺžöį 3D ŪŹČÍ∑† RMSEŽäĒ 6.57 mmŽ°ú ŽāėŪÉÄŽā¨žúľŽ©į, žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©ŪēėžßÄ žēäžĚÄ Í≤Ĺžöį 3D ŪŹČÍ∑† RMSEŽäĒ 16.07 mmŽ°ú ŽāėŪÉÄŽā¨Žč§.
žĚīŽäĒ žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēėžó¨ŽŹĄ ž†ēŪôēŽŹĄÍįÄ ÍįúžĄ†ŽźėžßÄ žēäŽäĒŽč§ŽäĒ Stott et al. (2020)žĚė žóįÍĶ¨ Í≤įÍ≥ľžôÄ žÉĀžĚīŪēú Í≤įÍ≥ľŽ•ľ Ž≥īžĚłŽč§. žĄ†ŪĖČžóįÍĶ¨žóźžĄúŽäĒ ŪēīžēąÍįÄ 2 km √ó 0.5 kmŽ•ľ ŽĆÄžÉĀžúľŽ°ú Phantom4 RTKŽ•ľ žĚīžö©Ūēėžó¨ žī¨žėĀÍ≥†ŽŹĄ 70 m, ž§ĎŽ≥ĶŽŹĄ 80%, žī¨žėĀÍįĀŽŹĄ 75ňöžĚė ž°įÍĪīžúľŽ°ú 3,390žě•žĚė žā¨žßĄžĚĄ žĚīžö©Ūēėžó¨ ž†ēŪôēŽŹĄ Ž∂ĄžĄĚžĚĄ žč§žčúŪēėžėÄŽč§. 3,300ÍįúžĚė Í≤Äžā¨ž†źžĚĄ žā¨žö©Ūēėžó¨ ž†ēÍ∑úŽ∂ĄŪŹ¨Ž•ľ ŪÜĶŪēú Ž∂ĄžĄĚžĚī ÍįÄŽä•Ūē† ž†ēŽŹĄžĚė ŽßéžĚÄ žąėžĚė Í≤Äžā¨ž†źžĚĄ žā¨žö©ŪēėžėÄžúľŽāė, žóįÍĶ¨ Ž©īž†Āžóź ŽĻĄŪēīžĄú žßÄžÉĀÍłįž§Äž†źžĚė žąėÍįÄ Ž∂Äž°ĪŪēėžėÄŽč§. Í∑ł Í≤įÍ≥ľ žā¨žö©Žźú žßÄžÉĀÍłįž§Äž†źÍįĄžĚė žĚīÍ≤©ÍĪįŽ¶¨ÍįÄ 500 mŽ•ľ žīąÍ≥ľŪēėžėÄŽč§. „Ä鎨īžĚłŽĻĄŪĖČžě•žĻė žěĎžóÖÍ∑úž†ē„ÄŹžóźŽäĒ 1 km2 ŽčĻ 9Íįú žĚīžÉĀžĚė žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēīžēľ Ūē®žĚĄ Ž™ÖžčúŪēėÍ≥† žěąžúľŽ©į, Yun and Yoon (2018)žĚÄ žßÄžÉĀÍłįž§Äž†źÍ≥ľ Í≤Äžā¨ž†źžĚė žĚīÍ≤©ÍĪįŽ¶¨ÍįÄ 500 mŽ•ľ žīąÍ≥ľ žčú žė§žį®ÍįÄ ŪĀ¨Í≤Ć ŽįúžÉĚŽźúŽč§Í≥† ŪēėžėÄŽč§. Í∑łŽü¨ŽĮÄŽ°ú UAVŽ•ľ žĚīžö©Ūēú žł°ŽüȞ󟞥ú žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēīžēľ Ūē† Í≤Ĺžöį žĚīÍ≤©ÍĪįŽ¶¨Ž•ľ ž§ÄžąėŪēėžó¨žēľ Ūē®žĚĄ žēĆ žąė žěąŽč§.
3.2 ž†ēžā¨žėĀžÉĀ ŪŹČÍįÄ ŽįŹ DSM, DTM ŪŹČÍįÄ
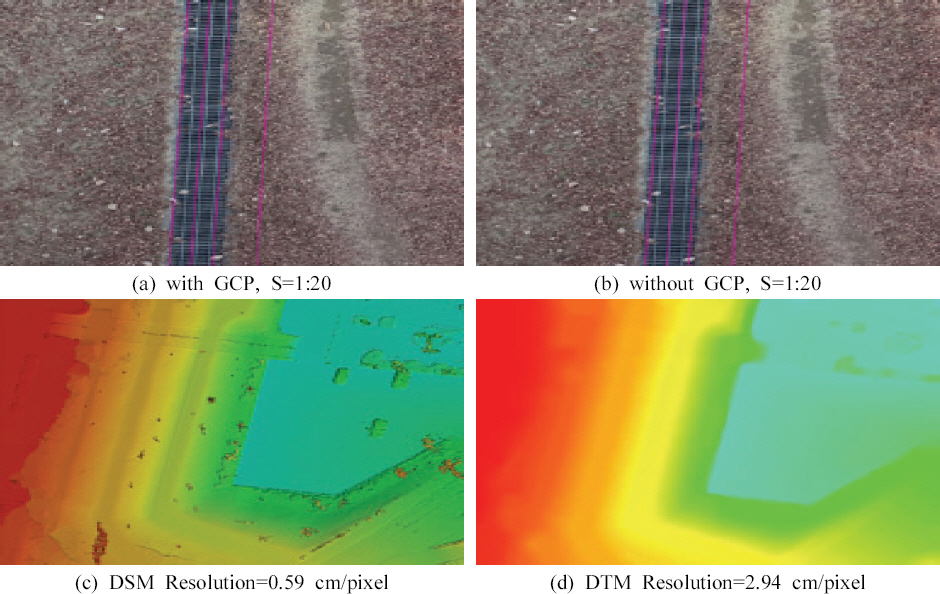
Pix4DŪĒĄŽ°úÍ∑łŽě®žĚĄ žĚīžö©Ūēėžó¨ žī¨žėĀŽźú žĚīŽĮłžßÄŽ°ú ž†ēžā¨žėĀžÉĀžĚĄ žÉĚžĄĪŪēėžėÄžúľŽ©į, ŽŹôžĚľžßÄžó≠žóź ŽĆÄŪēī ÍĶ≠Ū܆ž†ēŽ≥īžßÄŽ¶¨žõźžóźžĄú ž†úÍ≥ĶŪēėŽäĒ Ūē≠Í≥Ķžā¨žßĄžúľŽ°ú ž†úžěĎŽźú ž†ēžā¨žėĀžÉĀÍ≥ľ ŽĻĄÍĶźŪēėžėÄŽč§(Fig. 4). ŽėźŪēú žÉĚžĄĪŽźú ž†ēžā¨žėĀžÉĀžĚĄ 1:1,000 žąėžĻėžßÄŽŹĄŽ•ľ žĚīžö©Ūēėžó¨ ŽĻĄÍĶźŪēėžėÄžúľŽ©į, žÉĚžĄĪŽźú DEM, DTMžĚĄ ŽāėŪÉÄŽāīžóąŽč§(Fig. 5).

žóįÍĶ¨ŽĆÄžÉĀžßÄžó≠žĚĄ UAV, Ūē≠Í≥Ķžā¨žßĄ, žúĄžĄĪžā¨žßĄžúľŽ°ú ŽāėŪÉÄŽāīžóąŽč§. Ūē≠Í≥Ķžā¨žßĄžĚÄ ÍĶ≠Ū܆žßÄŽ¶¨ž†ēŽ≥īžõźžóźžĄú ž†úÍ≥ĶŪēėŽäĒ Ūē≠Í≥Ķžā¨žßĄžĚīŽ©į, žúĄžĄĪžā¨žßĄžĚÄ ÍĶ¨ÍłÄžĖīžä§ ŪĒĄŽ°úžóźžĄú ž∑®ŽďĚŪēú žúĄžĄĪžā¨žßĄžĚīŽč§. ŪēīžÉĀŽŹĄžóź ŽĒįŽĚľ žčúžĚłžĄĪžĚī Žß§žöį žÉĀžĚīŪēėŽ©į UAVŽ•ľ žĚīžö©Ūēėžó¨ ž†úžěĎŽźú ž†ēžā¨žėĀžÉĀžĚė ŪēīžÉĀŽŹĄÍįÄ ÍįÄžě• žĘčžĚÄ Í≤ɞ̥ ŪôēžĚłŪē† žąė žěąŽč§.
3.3 Í≥†žįį
Ž≥ł žóįÍĶ¨ŽĆÄžÉĀžßÄŽäĒ Fig. 4(a)žôÄ ÍįôžĚī žąėŽ™©žĚī ž†ĀžĚÄ Í≤®žöłžóź žī¨žėĀŪēú Í≤įÍ≥ľžĚīŽč§. ŪēėžßÄŽßĆ žč§ž†ú Í≥Ķžā¨ ŪėĄžě•žóź ž†Āžö©ŪēėÍłį žúĄŪēīžĄúŽäĒ žąėŽ™©žĚī ž°įŽįÄŪēú Í≤Ĺžöį ‚φ ž§ĎŽ≥ĶŽŹĄŽ•ľ ŽÜížĚīŽäĒ Žį©Ž≤ē ‚Ď° žąėŽ™©Ž≥īŽč§ ŽÜížĚÄ žúĄžĻėžóź žĚłÍ≥ĶŪĎúžč̞̥ žĄ§žĻėŪēėŽäĒ Žį©Ž≤ēžúľŽ°ú žąėŽ™©žĚī ŽßéžĚÄ žßÄŪėēžóźžĄú ŽįúžÉĚŪēėŽäĒ žĚĆžėĀžĚĄ ŪēīÍ≤įŪē† žąė žěąŽč§. žąėŽ™©žĚī ž°įŽįÄŪēú Í≤Ĺžöį žĚīžôÄ ÍįôžĚÄ Žį©Ž≤ēžúľŽ°ú žąėŽ™©Í≥ľ žßÄŽ©īžĚĄ Ž∂ĄŽ¶¨ Ūēėžó¨ ŽßƎ吏Ėī Žāľ žąė žěąžúľŽ©į ž†Āžö©žĚĄ žúĄŪēīžĄúŽäĒ ž∂ĒÍįÄž†ĀžĚł žóįÍĶ¨ÍįÄ ŪēĄžöĒŪēėŽč§. Žč§ŽßĆ, UAVÍįÄ Ūē≠Í≥ĶÍłįžóź ŽĻĄŪēī ž†ÄÍ≥†ŽŹĄžĚė ŽĻĄŪĖČžĚī ÍįÄŽä•ŪēėŽĮÄŽ°ú Fig. 4(b)žôÄ ÍįôžĚī Ūē≠Í≥Ķžā¨žßĄžī¨žėĀžĚĄ ŪÜĶŪēī ŽĻĄŪÉąŽ©ī Žāīžóź ž°īžě¨ŪēėŽäĒ žĚłÍ≥ĶŪĎúžč̞̥ žĚīžö©Ūēú ŪõĄŽį©ÍĶźŪöĆŽ•ľ žč§žčú Ūē† žąė žěąžĚĄ Í≤Ĺžöįžóź ŪēúŪēėžó¨ žú†žĚėŽĮłŪēú Í≤įÍ≥ľŽ•ľ žĖĽžĚĄ žąė žěąžĚĄ Í≤ÉžúľŽ°ú ŪĆźŽč®ŽźúŽč§.
4. Í≤į Ž°†
Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ ŽĻĄŪÉąŽ©īžóź ŽßźŽö̞̥ žĄ§žĻė Ūēú Ží§ Ū܆ŪÉąžä§ŪÖĆžĚīžÖėžĚĄ žĚīžö©Ūēėžó¨ ŽßźŽöĚ ŽĎźŽ∂ÄŽ•ľ Í≥Ąžł° ŪēėÍ≥† žĚīŽ•ľ Í≤Äžā¨ž†źžúľŽ°ú žā¨žö©ŪēėžėÄžúľŽ©į, UAVžĚė ž†ÄÍ≥†ŽŹĄ Ūē≠Í≥Ķžā¨žßĄžł°ŽüȞ̥ ŪÜĶŪēī žĖĽžĖīžßÄŽäĒ Í≤Ĺžā¨žā¨žßĄžĚė ÍīÄžł°ÍįížĚĄ ŽĻĄÍĶźŪē®žúľŽ°úžć®, 3D žúĄžĻė ž†ēŪôēŽŹĄ ŪŹČÍįÄŽ•ľ žč§žčúŪēėžėÄŽč§. ŽėźŪēú UAVŽ•ľ ŪÜĶŪēī ž†úžěĎŽźú ž†ēžā¨žėĀžÉĀÍ≥ľ Íłįž°ī Ūē≠Í≥ĶÍłį ŽįŹ žúĄžĄĪžĚė žěźŽ£ĆŽ•ľ ÍłįŽįėžúľŽ°ú ž†úžěĎŽźú ž†ēžā¨žėĀžÉĀÍįĄžĚė Ūíąžßą ŽĻĄÍĶźŽ•ľ ŪÜĶŪēī Žč§žĚĆÍ≥ľ ÍįôžĚÄ Í≤įŽ°†žĚĄ žĖĽžĚĄ žąė žěąžóąŽč§.
ž≤ęžßł žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©ŪēėžßÄ žēäÍ≥† RTKžĚė žīąÍłį žúĄžĻėŽ•ľ žĚīžö©Ūēėžó¨ Ž™®ŽćłŽßĀžĚĄ žč§žčúŪēú Í≤Ĺžöį 3D RMSEŽäĒ XŽį©ŪĖ•žúľŽ°ú 32.986, YŽį©ŪĖ•žúľŽ°ú 5.718, ZŽį©ŪĖ•žúľŽ°ú 9.499 mmžĚė ž†ēŪôēŽŹĄŽ•ľ Ž≥īžėÄžúľŽ©į, žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēú Í≤Ĺžöį XŽį©ŪĖ•žúľŽ°ú 5.035, YŽį©ŪĖ•žúľŽ°ú 7.005, ZŽį©ŪĖ•žúľŽ°ú 7.664 mmŽ°ú ŪŹČÍįÄŽźėžĖī žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūēú Í≤Ĺžöį ž†ēŪôēŽŹĄÍįÄ ž¶ĚÍįÄŪēėžėÄŽč§.
ŽĎėžßł RTK-UAVŽ•ľ žĚīžö©Ūēú Ūē≠Í≥Ķžā¨žßĄžī¨žėĀ ŪõĄ žßÄžÉĀÍłįž§Äž†ź žóÜžĚī ž†ēžā¨žėĀžÉĀžĚĄ žÉĚžĄĪŪēėÍ≥† „ÄéžĚľŽįėžł°ŽüČ žěĎžóÖÍ∑úž†ē„ÄŹžóźžĄú ž†ēŪēú ŽĻĄŪÉąŽ©īžĚė ž†ąž∑® Í≥Ķžā¨ žčú ŪĎúÍ≥†žóź ŽĆÄŪēú Ūóąžö© ŪĎúÍ≥† žė§žį®ŽäĒ 3 cm žĚīŽāīžĚė ž°įÍĪīžĚĄ ÍĪįžĚė ŽßĆž°ĪŪēėŽĮÄŽ°ú, ŪĖ•ŪõĄ žĻīŽ©ĒŽĚľ žĚľž≤īŪėē UAVŽ•ľ žĚīžö©Ūēėžó¨ ŽŹĄžěÖŽĻĄžö©žĚī ž†ĀÍ≥† žč†žÜćŪēú Žį©žč̞̳ RTKŽ•ľ žĚīžö©Ūēėžó¨ UAV žī¨žėĀžĚĄ žąėŪĖČŪēėÍ≥†, Ū܆Ž™©Í≥Ķžā¨žóź ŪēĄžöĒŪēú DSM, DTMžĚĄ ž†úžěĎŪēėžó¨ Ū܆žĄĚŽ•ė ŪēīžĄĚžóź žā¨žö©ŪēėÍĪįŽāė UAVŽ•ľ žĚīžö©Ūēėžó¨ ŪėĄžě• žú°žēąž°įžā¨Ž•ľ ŽĆÄž≤īŪē† žąė žěąžĚĄ Í≤ÉžĚīŽč§.
žÖčžßł UAVŽ•ľ Ū܆Ž™©Í≥Ķžā¨žö©žúľŽ°ú žā¨žö©ŪēėÍłį žúĄŪēú ž†ēŪôēŽŹĄžĚł 3 cm žĚīŽāīžĚė ž†ēŪôēŽŹĄŽäĒ Í∑ľž†ĎŪēėžėÄžúľŽāė, žßÄŽįėÍ≥Ąžł° žĄ§Í≥ĄÍłįž§ÄžúľŽ°ú žā¨žö©ŽźėŽäĒ 5 mm žĚīŽāīžĚė ž†ēŪôēŽŹĄŽäĒ ŽßĆž°ĪŪēėžßÄ Ž™ĽŪēėžėÄŽč§. ŪĖ•ŪõĄ žĄľžĄúžôÄ ŽďúŽ°†Íłįž≤īžĚė Íłįžą†Žįúž†ĄžúľŽ°ú ž†ēŪôēŽŹĄÍįÄ ŽÜížēĄžßą Í≤Ĺžöį žßÄŽįėÍ≥Ąžł°žóźŽŹĄ ž†Āžö© ÍįÄŽä• Ūē† Í≤ÉžĚīŽč§.
ŽĄ∑žßł UAVžł°ŽüȞ󟞥ú žßÄžÉĀÍłįž§Äž†źžĚĄ žā¨žö©Ūē† Í≤Ĺžöį žßÄžÉĀÍłįž§Äž†ź ŽįįžĻėŽäĒ žóįÍĶ¨ŽĆÄžÉĀžßÄžó≠žĚė žôłÍįĀžóź ŽįįžĻėŪēėžó¨žēľ ŪēėŽ©į, žßÄžÉĀÍłįž§Äž†ź žā¨žĚīžĚė ÍĪįŽ¶¨ŽäĒ Yun and Yoon (2018)žĚė žĄ†ŪĖČžóįÍĶ¨žóźžĄú žĖłÍłČŽźú ŽįĒžôÄ ÍįôžĚī 500 m žĚīŽāīŽ°ú ŽįįžĻėŪēīžēľ ŪēúŽč§.
Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ Ū܆ŪÉąžä§ŪÖĆžĚīžÖėžĚĄ žĚīžö©Ūēú žł°ŽüȞ󟞥ú ŪĒĄŽ¶¨ž¶ėžĚĄ žā¨žö©Ūēīžēľ ŪēúŽč§ŽäĒ žĚľŽįėžł°ŽüČ žěĎžóÖÍ∑úž†ēÍ≥ľ Žč¨Ž¶¨ žč§ŪóėžĚė žó¨ÍĪīžÉĀ Žįėžā¨žčúŪ䳎•ľ žā¨žö©Ūēėžó¨ Í≤Äžā¨ž†źžĚė žěźž≤ī ž†ēŪôēŽŹĄÍįÄ ŽĖ®žĖīžßÄŽäĒ Ž¨łž†úÍįÄ žě†žě¨Ūēī žěąŽč§. ŽėźŪēú ž†ÄÍįÄžĚė žĻīŽ©ĒŽĚľŽ•ľ žĚīžö©Ūēėžó¨ ŽįúžÉĚ ÍįÄŽä•Ūēú žė§žį®žóź ŽĆÄŪēú ŪŹČÍįÄÍįÄ žĚīŽ£®žĖīžßÄžßÄ žēäžēėŽč§. ŪĖ•ŪõĄžóźŽäĒ žĻīŽ©ĒŽĚľ žěźž≤ī žôúÍ≥°žĚĄ Ž≥īž†ēŪēėÍłį žúĄŪēī ŽāīŽ∂ÄŪĎúž†ēžĚĄ ÍįúžĄ†ŪēėÍ≥†, ŪĒĄŽ¶¨ž¶ėžĚĄ žā¨žö©ŪēėŽäĒ žč§ŪóėŽį©žčĚžĚė Í≥†ŽŹĄŪôĒŽ•ľ žúĄŪēú žóįÍĶ¨ÍįÄ ŪēĄžöĒŪē† Í≤ÉžĚīŽč§.




