

1. м„ң лЎ
TableВ 1
2. м—°кө¬ лҢҖмғҒ кө¬к°„ м„ м • л°Ҹ лҚ°мқҙн„° мҲҳ집
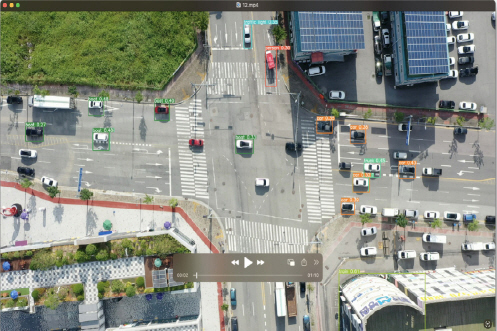
2.1 м—°кө¬ лҢҖмғҒ
2.2 нҳ„мһҘ мЎ°мӮ¬
TableВ 3
2.2.1 мҙ¬мҳҒ л“ңлЎ

2.3 мЎ°мӮ¬ мҳҒмғҒ 차종분лҘҳ
3. YOLOлҘј нҷңмҡ©н•ң м°Ёлҹү к°қмІҙ, мЈјн–ү кІҪлЎң лӘЁлӢҲн„°л§Ғ
TableВ 5
| Type | Image | Explanation | ||
|---|---|---|---|---|
| Car |

|
|
||
| Bus | Small |

|

|
Less than 16 passengers |
| Large |

|
|
16 or more passengers | |
| Truck | Small |

|
|
Less than 2.5 tons |
| Medium |

|
|
2.5 tons or more | |
| Large |

|
|
Semi/Full Trailer | |
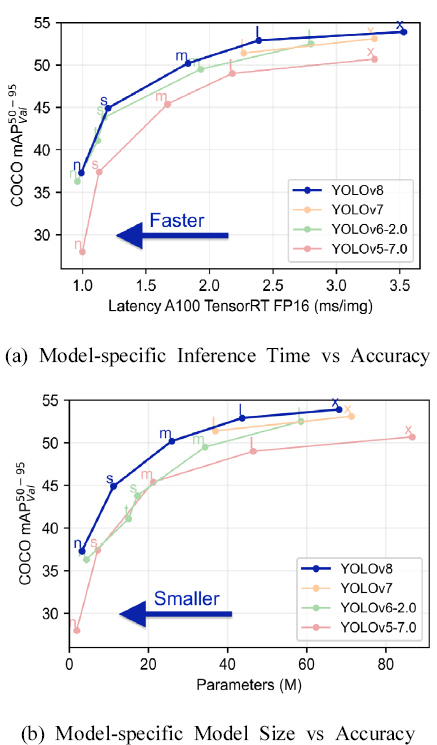
3.1 к°қмІҙ нғҗм§ҖлӘЁлҚё м„ м •
3.2 к°қмІҙ 추м Ғ м•Ңкі лҰ¬мҰҳ м„ м •
3.3 кІҪлЎң кІҖм¶ң м•Ңкі лҰ¬мҰҳ
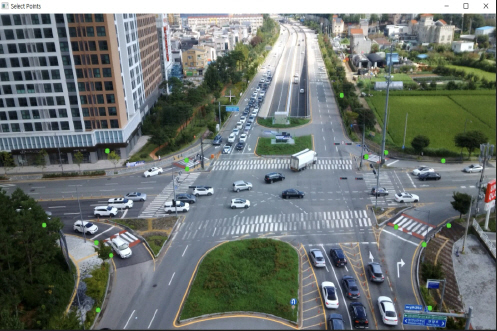
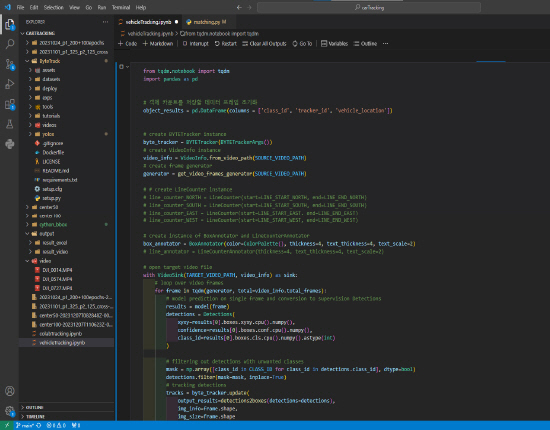
3.3.1 н”„лЎңк·ёлһЁмқҳ лҸҷмһ‘ кіјм •
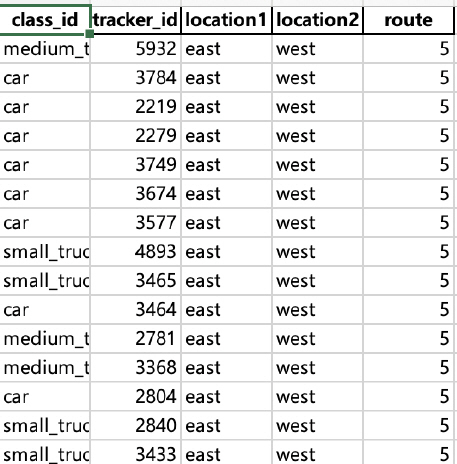
4. м°Ёлҹү к°қмІҙ л°Ҹ мЈјн–ү кІҪлЎң лӘЁлӢҲн„°л§Ғ кІ°кіј
4.1 көҗм°ЁлЎң көҗнҶөлҹү мҙ¬мҳҒ мЎ°кұҙлі„ нғҗм§ҖмңЁ 비көҗ кІ°кіј
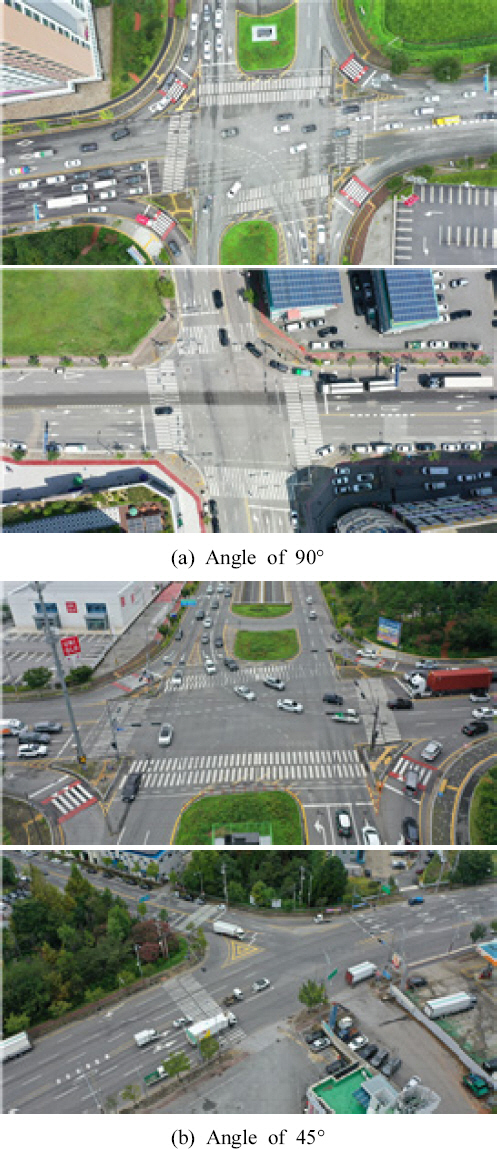
4.1.1 к°ҒлҸ„м—җ л”°лҘё к°қмІҙ нғҗм§Җ лҠҘл Ҙ м°Ёмқҙ

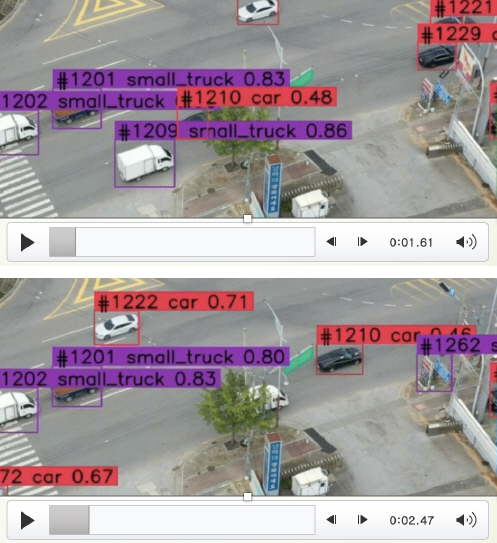
4.1.2 к°қмІҙ 추м Ғ мӢң л°ңмғқн•ҳлҠ” нҸҗмғү мҳҒм—ӯ 분м„қкіј мҙ¬мҳҒ к°ҒлҸ„ м„ нғқ
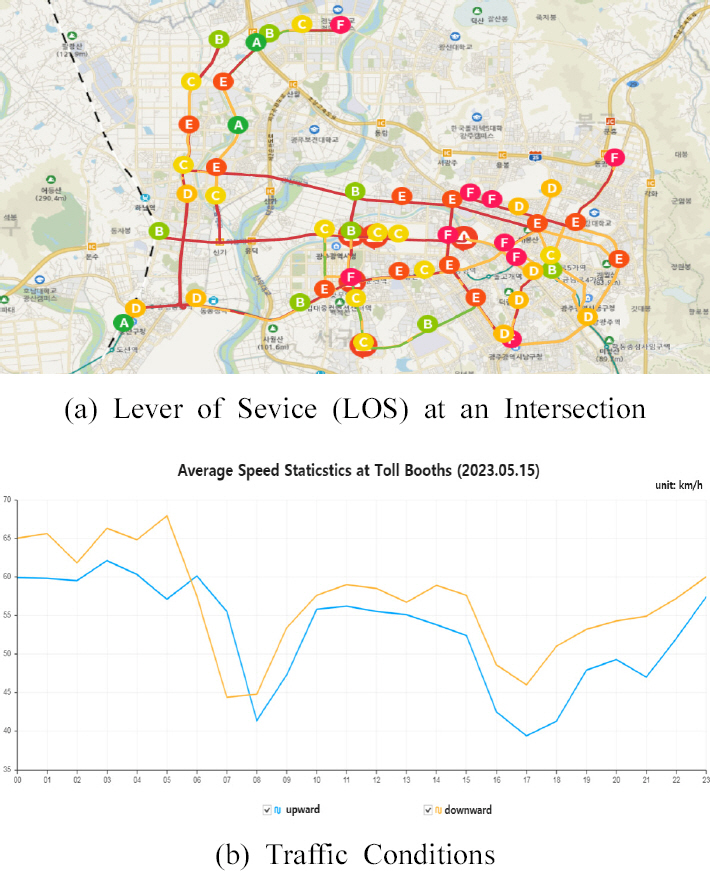
4.2 л“ңлЎ мҳҒмғҒ көҗнҶө лҚ°мқҙн„°мқҳ мқёмӢқлҘ кі лҸ„нҷ”
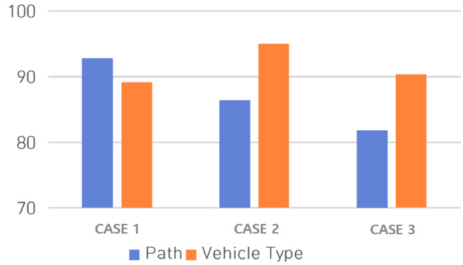
4.2.1 1м°Ё лӘЁлҚё мқёмӢқлҘ
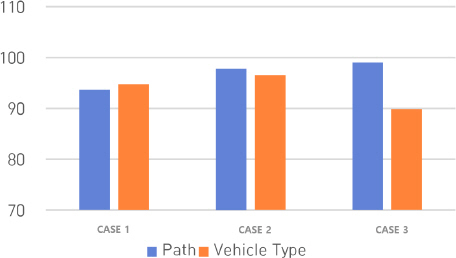
4.2.2 2м°Ё лӘЁлҚё мқёмӢқлҘ
5. кІ° лЎ
45лҸ„ к°ҒлҸ„мқҳ лҚ°мқҙн„° м„ёнҠёлҠ” нҸҗмғү мҳҒм—ӯ л¬ём ңлЎң кІҪлЎң кІҖм¶ңм—җ н•ңкі„лҘј к°Җм§Җкі мһҲм—ҲлӢӨ. л”°лқјм„ң 90лҸ„ к°ҒлҸ„мқҳ лҚ°мқҙн„° м„ёнҠёлҘј нҷңмҡ©н•ҳм—¬ нҸҗмғү мҳҒм—ӯмқҳ л°ңмғқ нҷ•лҘ мқ„ лӮ®м¶”кі к°қмІҙ 추м Ғм—җ лҜём№ҳлҠ” мҳҒн–Ҙмқ„ мөңмҶҢнҷ”н•ҳмҳҖмңјл©°, 90лҸ„ к°ҒлҸ„мқҳ лҚ°мқҙн„° м„ёнҠёлҘј мӨ‘мӢ¬л¶ҖмҷҖ мҷёкіҪмқ„ кө¬л¶„н•ҳм—¬ мқёмӢқлҘ мқ„ лҶ’мқҙкё° мң„н•ң мғҒнҳё 비көҗлҘј мҲҳн–үн•ҳмҳҖлӢӨ.
ліё м—°кө¬м—җм„ң к°ңл°ңлҗң к°қмІҙ л°Ҹ кІҪлЎң мқёмӢқ лӘЁлҚёмқ„ мӮ¬мҡ©н•ҳм—¬ мҲҳн–үн•ң кІҪлЎң кІҖм¶ң кІ°кіјлҘј нҷ•мқён•ң кІ°кіј, 45лҸ„ к°ҒлҸ„ мҙ¬мҳҒ мҳҒмғҒ л‘җ к°ңмҷҖ 90лҸ„ к°ҒлҸ„ мҙ¬мҳҒ мҳҒмғҒ н•ҳлӮҳлЎң кІҪлЎң мқёмӢқлҘ мқ„ нҸүк°Җн•ң кІ°кіј, 45лҸ„ к°ҒлҸ„ мҙ¬мҳҒ мҳҒмғҒмқҙ 90лҸ„ к°ҒлҸ„ мҙ¬мҳҒ мҳҒмғҒкіј 비көҗн•ҳл©ҙ кІҪлЎң мқёмӢқлҘ мқҙ нҒ¬кІҢ л–Ём–ҙм§ҖлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
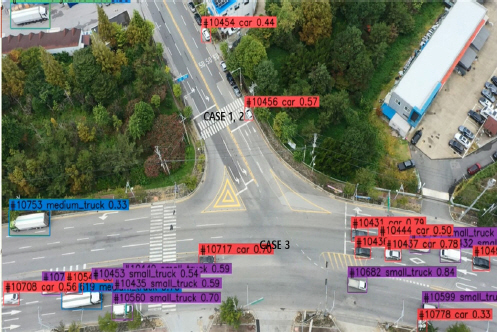
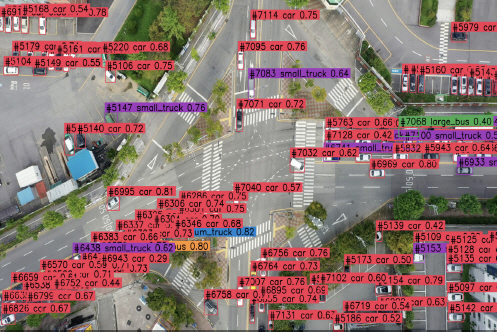
мҳҒмғҒ 분м„қ кІ°кіјм—җм„ң к°ҖлЎңмҲҳ, м „лҙҮлҢҖ л“ұмқҳ мһҘм• л¬јмқҙ м°Ёлҹү к°қмІҙлҘј к°ҖлҰ¬л©ҙм„ң к°қмІҙ нғҗм§Җк°Җ лҒҠкё°лҠ” кІғмқҙ кІҪлЎң мқёмӢқлҘ н•ҳлқҪмқҳ мЈјмҡ” мӣҗмқёмһ„мқ„ нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ.
кІҪлЎң мқёмӢқлҘ к°ңм„ мқ„ мң„н•ҙ нҳ„мһ¬ 90лҸ„ к°ҒлҸ„м—җм„ң мӮ¬кұ°лҰ¬ мӨ‘м•ҷмқ„ мҙ¬мҳҒн•ң мҳҒмғҒкіј мҷёкіҪмқ„ мҙ¬мҳҒн•ң мҳҒмғҒмқ„ 분лҘҳн•ҳм—¬ мғҲлЎңмҡҙ лҚ°мқҙн„° м„ёнҠёлҘј м ңмһ‘н•ҳкі л¶„м„қн•ҳмҳҖмңјл©°, м°Ёмў…лі„ мқёмӢқлҘ мқҖ нҸүк· 93.7%, кІҪлЎң мқёмӢқлҘ мқҖ нҸүк· 93.7%лЎң н–ҘмғҒлҗң лӘЁлҚёмқ„ к°ңл°ңн•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ.




