

1. м„ң лЎ
л§Өл…„ кұҙм„Өнҳ„мһҘм—җм„ңлҠ” м•Ҳм „мӮ¬кі к°Җ лҒҠмһ„м—Ҷмқҙ л°ңмғқн•ҳкі мһҲлӢӨ. мӢӨм ңлЎң мӮ°м—…м•Ҳм „ліҙкұҙкіөлӢЁм—җм„ң 분м„қн•ң 2022л…„ мӮ°м—…мһ¬н•ҙ л°ңмғқнҳ„нҷ©мқ„ мӮҙнҺҙліҙл©ҙ, мһ¬н•ҙ мӮ¬л§қмһҗ мӨ‘ кұҙм„Өм—…мқҖ м „мІҙ мӮ°м—…лҢҖ비 50% мқҙмғҒмқҳ 비мңЁмқ„ м°Ём§Җн•ҳм—¬ к°ҖмһҘ л§Һмқҙ л°ңмғқн•ҳлҠ” кІғмңјлЎң 분м„қлҗҗлӢӨ. 2022л…„лҝҗл§Ң м•„лӢҲлқј 2021л…„, 2020л…„ л“ұ кіјкұ°м—җлҸ„ м „мІҙ мӮ°м—…лҢҖ비 кұҙм„Өм—…м—җм„ң к°ҖмһҘ л§ҺмқҖ мӮ¬л§қмһҗк°Җ л°ңмғқн•ҳлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ(KOSHA, 2022). кұҙм„Өнҳ„мһҘмқҖ лӢӨлҘё мӮ°м—…м—җ 비н•ҙ мң„н—ҳ мҡ”мҶҢк°Җ лӢӨм–‘н•ҳкё° л•Ңл¬ём—җ м№ҳлӘ…м Ғмқё мқёлӘ…н”јн•ҙлЎң мқҙм–ҙм§Ҳ к°ҖлҠҘм„ұмқҙ лҶ’лӢӨ. лҶ’мқҖ кіім—җм„ңмқҳ мһ‘м—…мқҙ мқјмғҒм ҒмңјлЎң мқҙлЈЁм–ҙм§Җл©° мқҙлЎң мқён•ҙ 추лқҪ мӮ¬кі к°Җ л°ңмғқн• мң„н—ҳмқҙ лҶ’кі нҒ¬л Ҳмқё, көҙмӮӯкё° л“ұ лӢӨм–‘н•ң мў…лҘҳмқҳ мӨ‘мһҘ비к°Җ мӮ¬мҡ©лҗҳм–ҙ нҳ‘м°©, к№”лҰј л“ұмқҳ мӨ‘лҢҖмӮ¬кі лЎң мқҙм–ҙм§Ҳ нҷ•лҘ мқҙ л§Өмҡ° лҶ’лӢӨ. лҳҗн•ң кұҙм„Ө нҳ„мһҘмқҖ нҶ мӮ¬лӮҳ мһҘ비мқҳ мқҙлҸҷ, кё°мғҒ ліҖнҷ” л“ұ м§ҖмҶҚм ҒмңјлЎң ліҖнҷ”н•ҳлҠ” мһ‘м—… нҷҳкІҪмқҙкё° л•Ңл¬ём—җ л¶Ҳм•Ҳм •н•ң мһ‘м—… нҷҳкІҪмңјлЎң мқён•ҙ мһ‘м—…мһҗл“Өм—җкІҢ мң„н—ҳ мҡ”мҶҢлҘј лҶ’мқј мҲҳ мһҲлӢӨ. мқҙм—җ л”°лқј мӨ‘лҢҖмһ¬н•ҙмІҳлІҢлІ•мқҳ мӢңн–үкіј мӮ°м—…м•Ҳм „ліҙкұҙлІ• к°ңм • л“ұ кұҙм„Өнҳ„мһҘ м•Ҳм „ кё°мӨҖмқҙ к°•нҷ”лҗҳл©ҙм„ң м•Ҳм „кҙҖлҰ¬мһҗмқҳ мҲҳмҡ”лҠ” кёүмҰқн•ҳмҳҖлӢӨ. к°•нҷ”лҗң м•Ҳм „ кё°мӨҖм—җ л”°лқј м•Ҳм „кҙҖлҰ¬мһҗмқҳ м—ӯн• мқҙ мӨ‘мҡ”н•ҙм§Җкі мһҲм§Җл§Ң, 충분н•ң мқёл Ҙмқҙ нҷ•ліҙлҗҳм§Җ лӘ»н•ҳм—¬ м•Ҳм „кҙҖлҰ¬к°Җ м ңлҢҖлЎң мқҙлЈЁм–ҙм§Җм§Җ лӘ»н•ҳлҠ” кІҪмҡ°к°Җ л§Һкі м „л¬ём Ғмқё м§ҖмӢқкіј кІҪн—ҳмқҙ л¶ҖмЎұн• кІҪмҡ°, мӮ¬кі мҳҲл°© л°Ҹ лҢҖмқ‘ лҠҘл Ҙмқҙ м Җн•ҳлҗҳм–ҙ м Ғм Ҳн•ң м•Ҳм „кҙҖлҰ¬к°Җ м–ҙл Өмҡё мҲҳ мһҲлӢӨ. лҳҗн•ң, кҙ‘нҷңн•ң кұҙм„Ө нҳ„мһҘм—җм„ң м•Ҳм „кҙҖлҰ¬мһҗк°Җ лӘЁл“ мһ‘м—…мһҗмқҳ м•Ҳм „мқ„ к°җлҸ…н•ҳкі кҙҖлҰ¬н•ҳкё° м–ҙл Өмҡҙ кІҪмҡ°к°Җ л§ҺлӢӨ(CERIK, 2022). мқҙлҹ¬н•ң л¬ём ңм җл“Өмқ„ н•ҙкІ°н•ҳкё° мң„н•ҙм„ңлҠ” кұҙм„Өнҳ„мһҘ м•Ҳм „кҙҖлҰ¬м—җ лҢҖн•ң кҙҖлҰ¬ мһҗлҸҷнҷ” кё°мҲ к°ңл°ңмқҙ н•„мҡ”н•ҳлӢӨ. кұҙм„Өнҳ„мһҘм—җм„ң мһ‘м—…мһҗмқҳ мң„м№ҳлҘј нҷңмҡ©н•ҳл©ҙ нҠ№м • кө¬м—ӯм—җм„ң мң„н—ҳн•ң мғҒнҷ©мқҙ л№ҲлІҲн•ҳкІҢ л°ңмғқн•ҳлҠ” кІғмқ„ нҢҢм•…н•ҳкі мң„н—ҳ кө¬м—ӯмқҙлӮҳ мӨ‘мһҘ비 к·јмІҳм—җм„ңмқҳ мӮ¬кі л°ңмғқ к°ҖлҠҘм„ұмқ„ лӮ®м¶ң мҲҳ мһҲлӢӨ. лҳҗн•ң нҡЁмңЁм Ғмқё мһ‘м—… кҙҖлҰ¬к°Җ к°ҖлҠҘн•ҳл©° мқ‘кёү мғҒнҷ©м—җ лҢҖн•ҙ мӢ мҶҚн•ҳкІҢ лҢҖмқ‘н• мҲҳ мһҲлӢӨ. мқҙм—җ ліё м—°кө¬м—җм„ңлҠ” IMU м„јм„ң л°Ҹ UWB м„јм„ңлҘј нҷңмҡ©н•ҳм—¬ кұҙм„Өнҳ„мһҘ лӮҙ мһ‘м—…мһҗмқҳ мң„м№ҳлҘј нҢҢм•…н•ҳкі л””м§Җн„ё нҠёмңҲмқ„ нҶөн•ҙ мһ‘м—…мһҗмқҳ м•Ҳм „мқ„ кҙҖлҰ¬н• мҲҳ мһҲлҠ” кё°мҲ мқ„ к°ңл°ңн•ҳмҳҖлӢӨ.
кұҙм„Өнҳ„мһҘм—җм„ң мһ‘м—…мһҗмқҳ мң„м№ҳлҘј нҢҢм•…н•ҳлҠ” кё°мҲ л“ӨмқҖ м—¬лҹ¬ к°Җм§Җк°Җ мһҲлӢӨ. Lee et al. (2010)мқҖ RFID (Radio Frequency Identification) кё°мҲ л°Ҹ USN (Ubiquitous Sensor) кё°мҲ мқ„ нҷңмҡ©н•ҳм—¬ мӢӨмӢңк°„ мң„м№ҳ추м Ғ кё°мҲ (RTLS-Real Time Location System)м—җ лҢҖн•ҙ 분м„қн•ҳкі мқҙлҘј л°”нғ•мңјлЎң кұҙм„Ө нҳ„мһҘ м•Ҳм „кҙҖлҰ¬м—җ м Ғн•©н•ң мң„м№ҳ추м Ғ кё°мҲ мқ„ кө¬нҳ„н•ҳлҸ„лЎқ м ңм•Ҳн•ҳмҳҖмңјл©° Woo et al. (2011)мқҖ Wifi кё°л°ҳмқҳ мӢӨлӮҙ нҸ¬м§Җм…”лӢқ кё°лІ•мқ„ нҷңмҡ©н•ҳм—¬ кұҙм„Өнҳ„мһҘм—җм„ң мһ‘м—…мһҗл“Өмқҳ нҠёлһҳнӮ№ кё°лІ•мқ„ м ңм•Ҳн•ҳмҳҖлӢӨ. Kim et al. (2012)мқҖ к°ҖмҶҚлҸ„ л°Ҹ м••л Ҙ MEMS м„јм„ңлҘј нҷңмҡ©н•ҳм—¬ мЈјліҖнҷҳкІҪ м •ліҙлҘј м·Ёл“қн•ҳкі мқҙлҘј нҶөн•ҙ кұҙм„Өнҳ„мһҘ мһ‘м—…мһҗмқҳ мқҙлҸҷ м—¬л¶Җ л°Ҹ кі лҸ„м •ліҙлҘј нҢҗлӢЁн• мҲҳ мһҲлҸ„лЎқ мӢңмҠӨн…ңмқ„ к°ңл°ңн•ҳмҳҖлӢӨ. Umer and Siddiqui (2020)мқҳ м—°кө¬м—җм„ңлҠ” UWB (Ultra wide band)мқ„ нҷңмҡ©н•ҳм—¬ мғҒм—…м ҒмңјлЎң мӮ¬мҡ© к°ҖлҠҘн•ң RTLSлҘј кұҙм„Ө нҳ„мһҘм—җм„ңмқҳ мӢӨн–ү к°ҖлҠҘм„ұм—җ лҢҖн•ҳм—¬ м—°кө¬н•ҳмҳҖлӢӨ. лҳҗн•ң Park et al. (2023) к·ёлҰ¬кі Yang et al. (2010)мқҖ лЁёмӢ лҹ¬лӢқ кё°л°ҳмқҳ м»ҙн“Ён„° л№„м „мқ„ нҷңмҡ©н•ҳм—¬ лӢӨмҲҳмқҳ мһ‘м—…мһҗлҘј 추м Ғн• мҲҳ мһҲлҠ” к°ҖлҠҘм„ұмқ„ н…ҢмҠӨнҠён•ҳмҳҖлӢӨ. Li et al. (2020)мқҖ кұҙм„Ө нҳ„мһҘм—җм„ң мһ‘м—…нҡЁмңЁкіј м•Ҳм „мқ„ н–ҘмғҒмӢңнӮ¬ мҲҳ мһҲлҠ” мң„м№ҳ кІ°м • мӢңмҠӨн…ңмқ„ м„ұлҠҘ м§Җн‘ңлҘј м ңм•Ҳн•ҳм—¬ 비көҗ л°Ҹ нҸүк°Җн•ҳмҳҖмңјл©° м„јм„ңл“Өмқҳ нҳјн•© л°Ҹ BIM лӘЁлҚёкіјмқҳ нҶөн•© л“ұмқ„ к°•мЎ°н•ҳмҳҖлӢӨ. Kim et al. (2006)мқҖ ліҙлӢӨ м •нҷ•н•ң мң„м№ҳ м •ліҙлҘј м–»кё° мң„н•ҙ м№јл§Ң н•„н„°лҘј нҷңмҡ©н•ҳм—¬ GPSмҷҖ IMU м„јм„ңлҘј мңөн•©н•ҳлҠ” м•Ңкі лҰ¬мҰҳмқ„ м ңм•Ҳн•ҳмҳҖмңјл©° Guang et al. (2021)мқҖ LSTM м•Ңкі лҰ¬мҰҳмқ„ нҷңмҡ©н•ҳм—¬ GPSмҷҖ IMU м„јм„ңлҘј мңөн•©н•ҳмҳҖлӢӨ. Kwon (2019)мқҖ лЎңлҙҮмқ„ нҷңмҡ©н•ҳм—¬ м№јл§Ң н•„н„°лҘј м Ғмҡ©н•ң UWB л°Ҹ IMU ліөн•© м„јм„ң кё°л°ҳмқҳ мң„м№ҳ 추м Ғ мӢңмҠӨн…ңмқ„ м ңм•Ҳн•ҳмҳҖмңјл©°, Lim et al. (2020)мқҖ мқҙлҸҷ нҸүк· н•„н„°лҘј мӮ¬мҡ©н•ҳм—¬ IMU л°Ҹ UWB м„јм„ң мңөн•© л°©лІ•мқ„ м ңмӢңн•ҳмҳҖлӢӨ. Rao et al. (2022)мқҖ м„јм„ңлҘј нҶөн•ң кұҙм„Өнҳ„мһҘмқҳ мӢӨмӢңк°„ лӘЁлӢҲн„°л§Ғ л°©лІ•л“Өм—җ лҢҖн•ң м—°кө¬лҘј 진н–үн•ҳмҳҖлӢӨ.
мқҙ к°ҷмқҖ м—°кө¬лҘј нҶ лҢҖлЎң м—°кө¬мһҗл“ӨмқҖ мң„м№ҳ лҚ°мқҙн„°лҘј BIM нҷҳкІҪм—җм„ң нҷңмҡ©н•ҳлҠ” м—°кө¬лҸ„ 진н–үн•ҳмҳҖлӢӨ. Lee et al. (2014)мқҖ CSS (Chirp spread spectrum)лҘј кё°л°ҳмңјлЎң н•ң мӢӨмӢңк°„ мң„м№ҳ мқёмӢқ мӢңмҠӨн…ңмқ„ нҷңмҡ©н•ҳм—¬ мһ‘м—…мһҗмқҳ мң„м№ҳмўҢн‘ңлҘј л°”нғ•мңјлЎң мӢӨмӢңк°„мңјлЎң мһ‘м—…мһҗлҘј кҙҖлҰ¬н• мҲҳ мһҲлҠ” лӘЁлӢҲн„°л§Ғ лӘЁл“Ҳмқ„ м ңм•Ҳн•ҳмҳҖлӢӨ. Liu et al. (2020)мқҖ IMU м„јм„ңлҘј нҷңмҡ©н•ҳм—¬ мһ‘м—…мһҗмқҳ мң„м№ҳ, кұ·лҠ” мҶҚлҸ„, л°©н–Ҙкіј к°ҷмқҖ мһҗм„ё м •ліҙлҘј нҸ¬н•Ён•ң мӢӨлӮҙ мң„м№ҳ мӢңмҠӨн…ңмқ„ м ңм•Ҳн•ҳл©° мқҙлҘј BIM кё°л°ҳмқҳ мһҗлҸҷ кІҪкі мӢңмҠӨн…ңмңјлЎңмқҳ мқ‘мҡ© л°©м•Ҳмқ„ м ңм•Ҳн•ҳмҳҖлӢӨ. Ma at el. (2018)мқҖ BIMкіј мӢӨлӮҙнҸ¬м§Җм…”лӢқ кё°лІ•мқ„ нҷңмҡ©н•ҳм—¬ кұҙм„Өнҳ„мһҘ н’Ҳм§Ҳ кҙҖлҰ¬м—җ лҢҖн•ң м—°кө¬лҘј 진н–үн•ҳмҳҖлӢӨ. Lee et al. (2020)мқҖ нҷ”мһ¬ мӢң뮬л Ҳмқҙм…ҳкіј BIMмқҳ м—°лҸҷмқ„ м ңмӢңн•ҳмҳҖмңјл©°, Park et al. (2016)мқҖ лЎңлҙҮ кё°л°ҳмқҳ BIMкіј UWB нҶөн•© м–ҙн”ҢлҰ¬мјҖмқҙм…ҳмқ„ м ңм•Ҳн•ҳмҳҖлӢӨ. лҳҗн•ң Kim et al. (2018)мқҖ BIM кё°л°ҳ н”јлӮң мӢң뮬л Ҳмқҙм…ҳ л°©лІ•мқ„ м—°кө¬н•ҳмҳҖлӢӨ.
мқҙмІҳлҹј кұҙм„Өнҳ„мһҘмқҳ мһ‘м—…мһҗ мң„м№ҳлҘј мёЎм •н•ҳлҠ” л§ҺмқҖ кё°мҲ л“Өмқҙ к°ңл°ңлҗҳм—ҲмңјлӮҳ кё°мЎҙмқҳ лӢЁмқј м„јм„ңлҘј нҷңмҡ©н•ң м—°кө¬л“ӨмқҖ м •нҷ•лҸ„ мёЎл©ҙм—җм„ң н•ңкі„к°Җ мһҲлӢӨ. GPS кё°л°ҳмқҳ мёЎмң„ л°©лІ•мқҖ м „ м„ёкі„м ҒмңјлЎң л„җлҰ¬ мӮ¬мҡ©лҗҳм§Җл§Ң мӢӨлӮҙмҷҖ к°ҷмқҙ мң„м„ұ мӢ нҳёк°Җ м•Ҫн•ң нҷҳкІҪм—җм„ңлҠ” м •нҷ•лҸ„к°Җ л–Ём–ҙ진лӢӨ. RFID, WiFi, BLE, UWB л“ұ мЈјнҢҢмҲҳ кё°л°ҳмқҳ л¬ҙм„ м„јм„ңлҠ” мӢ нҳё к°•лҸ„к°Җ нҷҳкІҪ мҡ”мқём—җ л”°лқј ліҖлҸҷн• мҲҳ мһҲм–ҙ м •нҷ•лҸ„к°Җ л–Ём–ҙ진лӢӨ. лҳҗн•ң м№ҙл©”лқј л№„м „ кё°л°ҳмқҳ мң„м№ҳ мёЎмң„ кё°мҲ мқҖ мЎ°лӘ… л°Ҹ мӢңм•ј к°Җл Өм§җ л“ұм—җ мқҳн•ҙ м •нҷ•лҸ„к°Җ нҳ„м ҖнһҲ лӮ®м•„м§Ҳ мҲҳ мһҲлӢӨ. лӢЁмқј м„јм„ңмқҳ лӢЁм җмқ„ н•ҙкІ°н•ҳкё° мң„н•ҙ м„јм„ңлҘј мңөн•©н•ҳм—¬ кұҙм„Өнҳ„мһҘ мһ‘м—…мһҗмқҳ мң„м№ҳлҘј м •л°Җн•ҳкІҢ мёЎм •н•ҳлҠ” м—°кө¬лҠ” нҳ„мһ¬ л¶ҖмЎұн•ң кІғмңјлЎң нҢҗлӢЁн•ҳмҳҖлӢӨ. л”°лқјм„ң ліё м—°кө¬лҠ” мӢӨм ң кұҙм„Өнҳ„мһҘм—җм„ң мһ‘м—…мһҗмқҳ мң„м№ҳлҘј м •л°Җн•ҳкІҢ мёЎмң„н•ҳкё° мң„н•ҳм—¬ IMU л°Ҹ UWB м„јм„ңлҘј мңөн•©н•ҳкі мқҙлҘј BIM нҷҳкІҪм—җм„ң нҷңмҡ©н•ҳлҠ” кё°мҲ мқ„ к°ңл°ңн•ҳмҳҖлӢӨ.
2. м—°кө¬ л°©лІ•
2.1 IMU м„јм„ң кё°л°ҳ мң„м№ҳ 추м Ғ кё°лІ•
IMU (Inertial Measurement Unit) м„јм„ңлҠ” кҙҖм„ұмёЎм •мһҘм№ҳлЎңмҚЁ к°ҖмҶҚлҸ„, к°ҒмҶҚлҸ„ л“ұ кҙҖм„ұлҚ°мқҙн„°лҘј мёЎм •н• мҲҳ мһҲмңјл©° мқҙлҘј нҷңмҡ©н•ҳл©ҙ мһҗм„ё м •ліҙлҘј м•Ң мҲҳ мһҲлҠ” мҳӨмқјлҹ¬ м•өкёҖ лҳҗлҠ” мҝјн„°лӢҲм–ёмқ„ кі„мӮ°н• мҲҳ мһҲлӢӨ. ліё мӢӨн—ҳм—җм„ңлҠ” м„јм„ң лӮҙл¶Җм—җ мҳӨмқјлҹ¬ м•өкёҖ л°Ҹ мҝјн„°лӢҲм–ёмқ„ кі„мӮ°н• мҲҳ мһҲлҠ” MCU (Microcontroller Unit)к°Җ м„Өкі„лҗҳм–ҙ, кҙҖм„ұлҚ°мқҙн„°лҘј мёЎм •н•Ёкіј лҸҷмӢңм—җ мҳӨмқјлҹ¬ м•өкёҖмқҳ кі„мӮ°мқҙ к°ҖлҠҘн•ң AHRS (Attitude Heading Reference System) лӘЁл“Ҳ м„јм„ңлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ.
м„јм„ңмқҳ лҚ°мқҙн„° мёЎм • к°„кІ©мқҙ 짧мқ„ л•Ң, к°ҖмҶҚлҸ„лҘј мқҙмӨ‘мңјлЎң м Ғ분н•ҳл©ҙ мӣҖм§Ғмқё кұ°лҰ¬лҘј кі„мӮ°н•ҳм—¬ мң„м№ҳлҘј м¶”м •н• мҲҳ мһҲлӢӨ. м„јм„ңмқҳ л…ёмқҙмҰҲлӮҳ л“ңлҰ¬н”„нҠём—җ мқҳн•ң мҳӨм°Ё л•Ңл¬ём—җ м •м§Җ мғҒнғңмһ„м—җлҸ„ к°ҖмҶҚлҸ„ к°’мқҙ мёЎм •лҗҳлҠ” нҳ„мғҒмқҖ мң„м№ҳ м¶”м •мқҳ м •нҷ•лҸ„лҘј м Җн•ҳмӢңнӮӨлҜҖлЎң мқҙлҹ¬н•ң нҳ„мғҒмқ„ мөңмҶҢнҷ”н•ҳкё° мң„н•ҙ Zero-Velocity- Detectionмқ„ м„Өм •н•ҳм—¬ м •м§Җ мғҒнғңлҘј кө¬л¶„н•ҳмҳҖлӢӨ. 3축мқҳ к°ҖмҶҚлҸ„лҘј ax, ay, az лқјкі н•ҳл©ҙ м •м§Җ мғҒнғңлҘј кө¬л¶„н•ҳлҠ” мӢқмқҖ Eq. (1)кіј к°ҷмқҙ н‘ңнҳ„лҗңлӢӨ.
м—¬кё°м„ң, ОілҠ” мӢӨн—ҳмқ„ нҶөн•ҙ 1.1 m/s2лҘј м Ғмҡ©н•ҳмҳҖлӢӨ.
м–»м–ҙ진 к°ҖмҶҚлҸ„лҠ” кёҖлЎңлІҢ мўҢн‘ңкі„лҘј лӮҳнғҖлӮҙлҜҖлЎң мҳӨмқјлҹ¬ м•өкёҖмқ„ нҷңмҡ©н•ҳм—¬ ліҖнҷҳ н–үл ¬мқ„ мӮ¬мҡ©н•ҳл©ҙ лЎң컬 мўҢн‘ңкі„лЎң ліҖнҷҳн• мҲҳ мһҲлӢӨ. мҳӨмқјлҹ¬ м•өкёҖмқҳ Roll, Pitch, YawлҘј к°Ғк°Ғ ПҲ, Оё, П• лқјкі н•ҳл©ҙ ліҖнҷҳ н–үл ¬мқҖ Eq. (2)мҷҖ к°ҷмқҙ н‘ңнҳ„н• мҲҳ мһҲлӢӨ.
(2)
мқҙлҘј нҶөн•ҙ ліҖнҷҳлҗң лЎң컬 мўҢн‘ңкі„мқҳ к°ҖмҶҚлҸ„лҘј axвҖҷ, ayвҖҷ, azвҖҷ, мҶҚлҸ„мҷҖ мң„м№ҳ ліҖнҷ”лҹүмқ„ к°Ғк°Ғ v, О”p мқҙлқј н•ҳл©ҙ, Eq. (3)кіј к°ҷмқҙ н‘ңнҳ„н• мҲҳ мһҲлӢӨ.
л”°лқјм„ң мӢңм җ tм—җм„ңмқҳ мң„м№ҳ p(t) лҠ” Eq. (4)мҷҖ к°ҷлӢӨ.
IMU м„јм„ң л¶Җм°© мң„м№ҳлҠ” л°ңл“ұмқҙл©° Fig. 1кіј к°ҷмқҙ мӢӨм ң кұҙм„Өнҳ„мһҘмқ„ нҶөн•ҙ м–»мқҖ мң„м№ҳ 추м Ғ кІ°кіјлҠ” Fig. 2мҷҖ к°ҷлӢӨ.


IMU м„јм„ңлҘј нҷңмҡ©н•ң мң„м№ҳ 추м Ғ кё°лІ•мқҖ кҙ‘нҷңн•ҳкі мһҘм• л¬јмқҙ л§ҺмқҖ кұҙм„Өнҳ„мһҘм—җм„ңлҸ„ лҶ’мқҖ м„ұлҠҘмқ„ ліҙм—¬мӨҖлӢӨ. лҳҗн•ң мғҳн”Ңл§Ғ к°„кІ©мқҙ 짧아 м •л°Җн•ң мң„м№ҳ 추м Ғмқҙ к°ҖлҠҘн•ң кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ. к·ёлҹ¬лӮҳ м Ғл¶„кіјм •м—җм„ң л°ңмғқн•ҳлҠ” мҳӨм°Ёмқҳ лҲ„м ҒмңјлЎң мқён•ҙ мһҘкё°к°„ мӮ¬мҡ©м—җлҠ” н•ңкі„к°Җ мһҲлӢӨ.
2.2 UWB кё°л°ҳ мёЎмң„ кё°лІ•
UWB (Ultra-wideband)лҠ” мҙҲкҙ‘лҢҖм—ӯ л¬ҙм„ нҶөмӢ кё°мҲ лЎң, л§Өмҡ° л„“мқҖ лҢҖм—ӯм—җ кұёміҗ лӮ®мқҖ м „л ҘмңјлЎң лҢҖмҡ©лҹүмқҳ м •ліҙлҘј м „мҶЎн•ҳлҠ” кё°мҲ мқҙлӢӨ. мһ‘м—…мһҗмқҳ мӢ мІҙм—җ л¶Җм°©мқҙ к°ҖлҠҘн•ң нғңк·ё(tag)мҷҖ лҜёлҰ¬ м •н•ҙ진 кі м • мң„м№ҳм—җ м„Өм№ҳлҗң м•өм»Ө(anchor)лЎң кө¬м„ұлҗҳм–ҙ мһҲмңјл©° Fig. 3кіј к°ҷмқҙ ToF (Time of Flight) кё°л°ҳмқҳ TWR (Two Way Ranging) л°©мӢқмқ„ мӮ¬мҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н• мҲҳ мһҲлӢӨ.
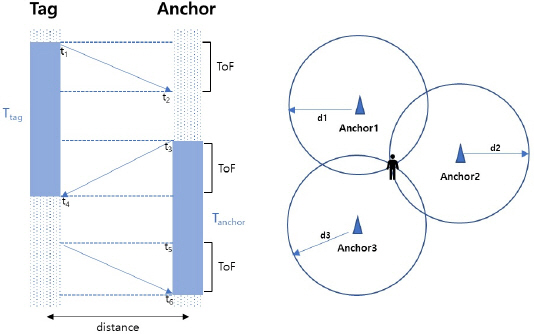
нғңк·ёлҘј л¶Җм°©н•ң мһ‘м—…мһҗмҷҖ м•өм»ӨмҷҖмқҳ кұ°лҰ¬ dлҠ” м „мһҗкё°нҢҢмқҳ мҶҚлҸ„мҷҖ мёЎм • мӢңк°„мқҳ кіұмңјлЎң Eq. (5)мҷҖ к°ҷмқҙ н‘ңнҳ„лҗҳл©°
мқҙ л•Ң, ToFлҠ” Eq. (6)кіј к°ҷмқҙ кі„мӮ°лҗңлӢӨ.
м•өм»Өмқҳ кі м • мң„м№ҳлҘј xi, yi лқјкі н• л•Ң, м•өм»ӨмҷҖмқҳ кұ°лҰ¬ di лҘј нҷңмҡ©н•ҳм—¬ мӮјліҖмёЎлҹүмқ„ нҶөн•ҙ м •л°Җ мң„м№ҳлҘј мёЎм •н• мҲҳ мһҲлӢӨ.
(8)
мөңмҶҢ мһҗмҠ№лІ•мқ„ нҷңмҡ©н•ҳл©ҙ мһ‘м—…мһҗмқҳ мң„м№ҳ x,y лҘј кө¬н• мҲҳ мһҲмңјл©° UWBлҘј нҷңмҡ©н•ң мӢӨмӢңк°„ мң„м№ҳ추м Ғ мӢӨн—ҳ кІ°кіј л°Ҹ мӢӨн—ҳнҳ„мһҘмқҖ Fig. 4мҷҖ к°ҷлӢӨ.

(10)
кұҙм„Өнҳ„мһҘм—җм„ңлҠ” мһҘм• л¬јмқҙ л§Һм•„ л©ҖнӢ°нҢЁмҠӨнҳ„мғҒмқҙ л№ҲлІҲн•ҳлӢӨ. UWB кё°л°ҳмқҳ мёЎмң„ кё°мҲ мқҖ кё°мЎҙмқҳ WiFiлӮҳ лё”лЈЁнҲ¬мҠӨліҙлӢӨ м •л°Җн•ң кұ°лҰ¬ л°Ҹ мң„м№ҳ мёЎм •мқҙ к°ҖлҠҘн•ҳм§Җл§Ң IMU м„јм„ңм—җ 비н•ҙ мһҘм• л¬јм—җ лҢҖн•ң мҳӨм°Ёк°Җ нҒ¬л©° мҲҳмӢ лІ”мң„лҘј л„“нһҲкё° мң„н•ҙм„ м•өм»Өмқҳ 추к°Җ м„Өм№ҳк°Җ н•„мҡ”н•ҳкі л№„мҡ©мқҙ л°ңмғқн•ңлӢӨ.
2.3 м№јл§Ң н•„н„° кё°л°ҳмқҳ м„јм„ң н“Ём „
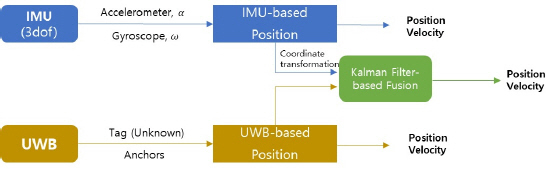
м•һм„ң м–ёкёүн•ң л°”мҷҖ к°ҷмқҙ IMUмҷҖ UWB м„јм„ңлҘј кІ°н•©н•ҳм—¬ мӮ¬мҡ©н•ҳл©ҙ, к°Ғ м„јм„ңмқҳ н•ңкі„лҘј ліҙмҷ„н•ҳм—¬ лҚ”мҡұ м •нҷ•н•ҳкі кІ¬кі н•ң мң„м№ҳ м¶”м •мқҙ к°ҖлҠҘн•ҳлӢӨ. ліё м—°кө¬м—җм„ң м ңм•Ҳн•ҳлҠ” л‘җ м„јм„ңмқҳ кІ°н•© мӢңмҠӨн…ңмқҖ Fig. 5мҷҖ к°ҷлӢӨ.
м№јл§Ң н•„н„°лҠ” мҳӨм°ЁлҘј к°Җм§ҖлҠ” кҙҖмёЎм№ҳлЎңл¶Җн„° мӢңмҠӨн…ңмқҳ мғҒнғңлҘј м¶”м •н•ҳкұ°лӮҳ м ңм–ҙн•ҳкё° мң„н•ң м•Ңкі лҰ¬мҰҳмңјлЎңм„ң Fig. 6кіј к°ҷмқҙ мғҒнғң мҳҲмёЎкіј м¶”м •мқ„ мһ¬к·Җм ҒмңјлЎң л°ҳліөн•ңлӢӨ. ліё м—°кө¬м—җм„ңлҠ” м№јл§Ңн•„н„°лҘј м Ғмҡ©н•ҳкё° мң„н•ҳм—¬ мғҒнғң лІЎн„°лҘј Eq. (12)мҷҖ к°ҷмқҙ м •мқҳн•ҳмҳҖлӢӨ.
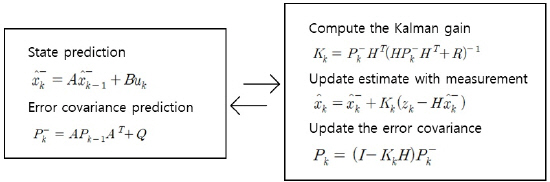
л”°лқјм„ң мғҒнғң л°©м •мӢқмқҖ Eq. (13)кіј к°ҷлӢӨ.
(13)
2.4 BIMмқ„ нҷңмҡ©н•ң мһ‘м—…мһҗ м•Ҳм „ лӘЁлӢҲн„°л§Ғ кё°мҲ
BIM (Building Information Modeling)мқҖ кұҙм„Өкіј кҙҖл Ёлҗң м •ліҙлҘј нҶөн•©м ҒмңјлЎң кҙҖлҰ¬н•ҳкі кіөмң н• мҲҳ мһҲлҠ” л””м§Җн„ё мӢңмҠӨн…ңмңјлЎңмҚЁ 3D лӘЁлҚёмқ„ кё°л°ҳмңјлЎң мӢңкіө мӨ‘ кө¬мЎ°л¬јм—җ лҢҖн•ң м •ліҙлҘј нҢҢм•…н•ҳкі кіөм •м—җ лҢҖн•ң мң„н—ҳ кө¬м—ӯмқ„ м„Өм •н• мҲҳ мһҲлӢӨ. мқҙлҘј нҷңмҡ©н•ҳл©ҙ мӣЁм–ҙлҹ¬лё” м„јм„ңлЎңл¶Җн„° мһ‘м—…мһҗмқҳ мң„м№ҳлҘј м¶”м •н•ң нӣ„ мң„н—ҳ кө¬м—ӯм—җ лҢҖн•ң м ‘к·ј м—¬л¶ҖлҘј нҢҗлӢЁн• мҲҳ мһҲлӢӨ. BIMмқ„ нҷңмҡ©н•ҳл©ҙ 2D лҸ„л©ҙм—җм„ңмқҳ мһ‘м—…мһҗ мң„м№ҳ нҢҢм•…лҝҗл§Ң м•„лӢҲлқј Z축мқ„ кі л Өн•ң 3D нҷҳкІҪм—җм„ңлҸ„ мһ‘м—…мһҗлҘј нҢҢм•…н• мҲҳ мһҲлӢӨ. ліё м—°кө¬м—җм„ңлҠ” BIM ToolлЎң Autodesk Revit л°Ҹ DynamoлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. Fig. 7мқҖ Dynamo лӮҙм—җм„ң м—°кІ°лҗң л…ёл“ңлҘј лӮҳнғҖлӮёлӢӨ. A лӘЁл“ҲмқҖ мёЎмң„ лҚ°мқҙн„°лҘј кё°мӨҖмңјлЎң BIM нҷҳкІҪм—җ мһ‘м—…мһҗлҘј л§өн•‘н•ҳкі , B лӘЁл“ҲмқҖ мң„н—ҳ кө¬м—ӯмқ„ м„Өм •н•ҳкі мқјм • кұ°лҰ¬ м ‘к·ј мӢң м•ҢлһҢмқ„ мЈјлҠ” м—ӯн• мқҙлӢӨ.

3. мӢӨн—ҳ кІ°кіј л°Ҹ 분м„қ
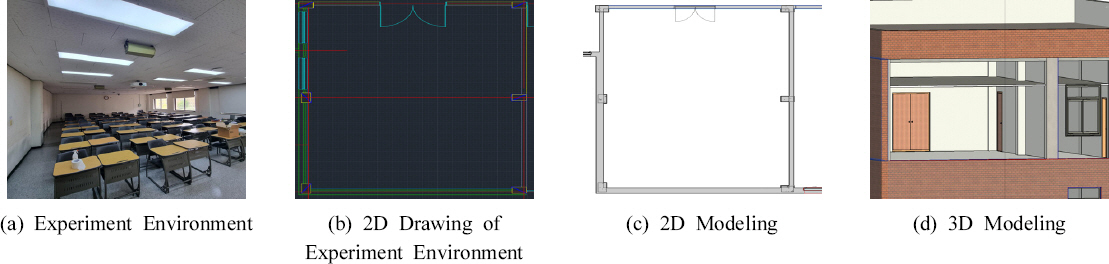
ліё м—°кө¬м—җм„ң м ңм•Ҳн•ң к°ңл°ң кё°мҲ мқҳ кІҖмҰқмқ„ мң„н•ҙ лҸ„л©ҙмқ„ нҷңмҡ©н•ҳм—¬ мӢӨн—ҳ нҷҳкІҪмқ„ м§Ғм ‘ лӘЁлҚёл§Ғн•ЁмңјлЎңмҚЁ 2D л°Ҹ 3D нҷҳкІҪмқҳ н…ҢмҠӨнҠёлІ л“ңлҘј кө¬м¶•н•ҳмҳҖлӢӨ. Revitмқ„ нҷңмҡ©н•ҳм—¬ LOD 200 мҲҳмӨҖмқҳ лӘЁлҚёл§Ғмқ„ 진н–үн•ҳмҳҖмңјл©° Fig. 8кіј к°ҷмқҙ кІҪлЎңлҘј мӮ¬к°Ғнҳ•мңјлЎң м„Өм •н•ҳм—¬ кјӯм§Җм җл§ҲлӢӨ UWB м•өм»Ө м„Өм№ҳн•ҳмҳҖлӢӨ. UWBмқҳ м•өм»Ө кі м • мўҢн‘ңлҠ” Revit нҷҳкІҪм—җм„ңмқҳ лӘЁлҚёмқҳ мўҢн‘ңмҷҖ мқјм№ҳмӢңмј°лӢӨ.
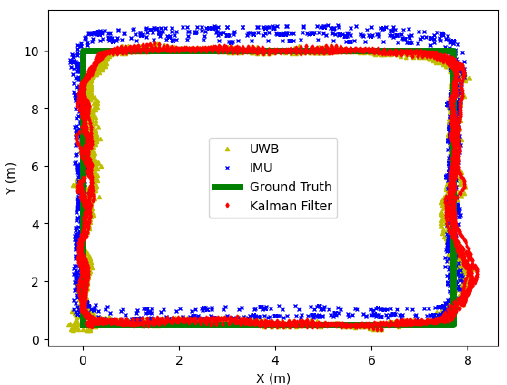
IMU л°Ҹ UWB нғңк·ёлҘј л¶Җм°©н•ң нӣ„ мӮ¬к°Ғнҳ• кІҪлЎңлҘј мҙқ 6л°”нҖҙ ліҙн–үн•ҳм—¬ мӢӨн—ҳмқ„ 진н–үн•ҳмҳҖлӢӨ. мёЎмң„ кІ°кіјлҠ” Fig. 9 л°Ҹ Table 1кіј к°ҷлӢӨ. мІ« лІҲм§ё л°”нҖҙмҷҖ л§Ҳм§Җл§ү л°”нҖҙмқҳ MAE (Mean Absolute Error) л°Ҹ RMSE (Root Mean Square Error)лҘј 비көҗн•ң кІ°кіј, IMU м„јм„ңмқҳ кІҪмҡ° мӢңк°„мқҙ м§ҖлӮЁм—җ л”°лқј мҳӨм°Ёк°Җ лҲ„м Ғлҗҳм–ҙ кІҪлЎңлҘј мЎ°кёҲм”© лІ—м–ҙлӮҳлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬мңјл©°, UWBмқҳ кІҪмҡ° нҷҳкІҪм—җ л”°лқј мҲҳмӢ лҘ мқҙ м Җн•ҳлҗҳлҠ” кө¬к°„м—җм„ң мҳӨм°Ёк°Җ нҒ¬кІҢ мҰқк°Җн•ҳмҳҖлӢӨ. м№јл§Ң н•„н„°лҘј м Ғмҡ©н•ҳл©ҙ л‘җ м„јм„ңмқҳ мёЎмң„к°’м—җ к°ҖмӨ‘м№ҳлҘј кі„мӮ°н•ҳм—¬ мөңм Ғмқҳ мң„м№ҳ мғҒнғңлҘј м¶”м •н•ЁмңјлЎңмҚЁ л…ёмқҙмҰҲлҘј м ңкұ°н•ңлӢӨ. UWBмқҳ мёЎмң„к°’м—җ к°ҖмҶҚлҸ„ кҙҖм„ұлҚ°мқҙн„°лҘј нҷңмҡ©н•ҳм—¬ ліҙлӢӨ м •нҷ•н•ң мёЎмң„лҘј 진н–үн•ЁмңјлЎңмҚЁ н•ӯмғҒ UWBліҙлӢӨ лӮ®мқҖ мҳӨм°ЁлҘј к°Җм§Җл©° мһҘкё°к°„ мӮ¬мҡ©мқҙ к°ҖлҠҘн•ҳлӢӨ. мқҙлЎң мқён•ҙ л””м§Җн„ё нҠёмңҲ нҷҳкІҪм—җ мӢӨм ң мӮ¬л¬јмқҳ лҚ”мҡұ м •нҷ•н•ң л§Өн•‘мқҙ к°ҖлҠҘн•ҳлӢӨ.
TableВ 1
Positioning Data Error Comparison
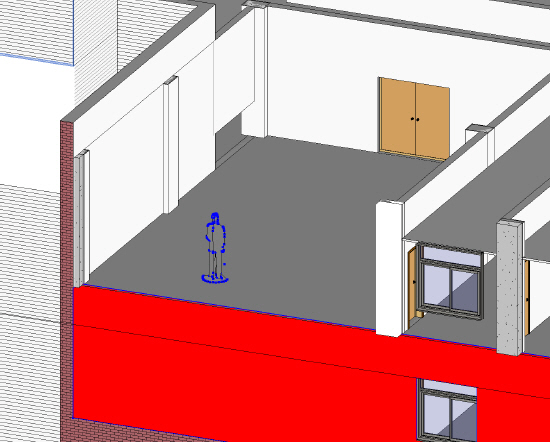
мӢӨн—ҳмңјлЎң м·Ёл“қн•ң мң„м№ҳ лҚ°мқҙн„°лҘј кё°л°ҳмңјлЎң л””м§Җн„ё нҠёмңҲ нҷҳкІҪм—җ л§өн•‘н•ң кІ°кіјлҠ” Fig. 10кіј к°ҷлӢӨ. мқҙлҘј нҶөн•ҙ мһ‘м—…мһҗлҘј л””м§Җн„ё нҠёмңҲ нҷҳкІҪм—җм„ң лӘЁлӢҲн„°л§Ғн•ҳм—¬ м•Ҳм „ кҙҖлҰ¬мһҗк°Җ н•ңлҲҲм—җ мһ‘м—…мһҗл“Өмқ„ кҙҖлҰ¬н• мҲҳ мһҲлҸ„лЎқ кө¬нҳ„н•ҳмҳҖлӢӨ(Figs. 10 and 11).


мӢӨн—ҳ нҷҳкІҪмқ„ кё°мӨҖмңјлЎң 추лқҪмӮ¬кі мқҳ мӣҗмқёмқҙ лҗҳлҠ” лӢЁл¶ҖлҘј мң„н—ҳкө¬м—ӯмңјлЎң м„Өм •н•ҳмҳҖлӢӨ. мң„н—ҳ кө¬м—ӯмқҳ мң„м№ҳ лҚ°мқҙн„°лҘј кё°мӨҖмңјлЎң мһ‘м—…мһҗмҷҖмқҳ кұ°лҰ¬мқҳ кі„мӮ°мқҙ мһҗлҸҷмңјлЎң к°ҖлҠҘн•ҳл©° 1 m кұ°лҰ¬ мқҙн•ҳ м ‘к·ј мӢң 2D лҸ„л©ҙм—җ м•ҢлһҢ л°Ҹ мң„н—ҳ кө¬м—ӯкіјмқҳ кұ°лҰ¬лҘј н‘ңм¶ңн•ҙмЈјлҠ” кё°лҠҘмқ„ кө¬нҳ„н•ҳмҳҖлӢӨ(Figs. 12 and 13). мқҙлҘј нҶөн•ҙ м•Ҳм „кҙҖлҰ¬мһҗк°Җ нҳ„мһҘмқҙ м•„лӢҢ мҷёл¶Җ мһҘмҶҢм—җм„ңлҸ„ л””м§Җн„ё нҠёмңҲмқ„ нҶөн•ҙ мһ‘м—…мһҗмқҳ мң„н—ҳ кө¬м—ӯ нҶөм ң л“ұ м•Ҳм „ кҙҖлҰ¬к°Җ к°ҖлҠҘн• кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
4. кІ° лЎ
ліё м—°кө¬лҠ” м„јм„ң н“Ём „мқ„ нҶөн•ҳм—¬ мһ‘м—…мһҗмқҳ мң„м№ҳ нҢҢм•… м •нҷ•лҸ„лҘј н–ҘмғҒн•ҳкі л””м§Җн„ё нҠёмңҲмқ„ нҶөн•ҙ лӘЁлӢҲн„°л§Ғн• мҲҳ мһҲлҠ” лӘЁлҚёмқ„ к°ңл°ңн•ҳмҳҖлӢӨ. к°ңл°ң мӢңмҠӨн…ңмқ„ кІҖмҰқн•ҳкё° мң„н•ҳм—¬ мӢӨм ң мӢӨн—ҳ мһҘмҶҢлҘј лӘЁлҚёл§Ғн•ҳкі IMU л°Ҹ UWB м„јм„ңмқҳ лҸҷмӢң мёЎмң„лҘј 진н–үн•ҳмҳҖлӢӨ. л‘җ м„јм„ңмқҳ лӢЁм җмқ„ к°ңм„ н•ҳкё° мң„н•ҳм—¬ м№јл§Ң н•„н„°лҘј м Ғмҡ©н•ң м„јм„ң н“Ём „ мёЎмң„ лӘЁлҚёмқ„ м ңмӢңн•ҳмҳҖкі , MAE л°Ҹ RMSE к°’мқ„ нҶөн•ҙ ліё м—°кө¬м—җм„ң м Ғмҡ©н•ң м•Ңкі лҰ¬мҰҳмқҙ м •нҷ•лҸ„ н–ҘмғҒм—җ лҸ„мӣҖмқ„ мЈјлҠ” кІғмқ„ нҷ•мқён•ҳмҳҖлӢӨ. л”°лқјм„ң л””м§Җн„ё нҠёмңҲ нҷҳкІҪм—җм„ң мӢӨм ң мӮ¬л¬јмқҳ мң„м№ҳлҘј лҚ”мҡұ м •нҷ•нһҲ нҢҢм•…н• мҲҳ мһҲмқ„ кІғмңјлЎң ліј мҲҳ мһҲлӢӨ. мөңмў…м ҒмңјлЎң мёЎмң„ лҚ°мқҙн„°лҘј кё°мӨҖмңјлЎң л””м§Җн„ё нҠёмңҲм—җ л§өн•‘н•ЁмңјлЎңмҚЁ мң„н—ҳкө¬м—ӯм—җ м ‘к·ј мӢң мһҗлҸҷ кұ°лҰ¬ мӮ°м¶ң л°Ҹ м•ҢлһҢмқ„ мЈјлҠ” лӘЁмҠөмқ„ нҷ•мқён•ҳмҳҖлӢӨ. ліё м—°кө¬кІ°кіјлҘј нҷңмҡ©н•ҳл©ҙ кұҙм„Өнҳ„мһҘмқҳ мӢңкіө мғҒнҷ©м—җм„ң л°ңмғқн• мҲҳ мһҲлҠ” мң„н—ҳкө¬м—ӯмқ„ мӮ¬м „м—җ BIM лӘЁлҚём—җ м •мқҳн•ҳкі мң„н—ҳ мғҒнҷ©мқ„ лҜёлҰ¬ нҢҢм•… л°Ҹ мЎ°м№ҳн•ҳм—¬ кұҙм„Өнҳ„мһҘ м•Ҳм „мӮ¬кі м Ҳк°җм—җ кё°м—¬н• мҲҳ мһҲлӢӨ. лҳҗн•ң, мһҗлҸҷ лӘЁлӢҲн„°л§Ғ мӢңмҠӨн…ңмқ„ нҶөн•ҙ л¶ҖмЎұн•ң м•Ҳм „кҙҖлҰ¬мһҗмқҳ мқёл Ҙ л¬ём ңлҘј н•ҙкІ°н• мҲҳ мһҲмқ„ кІғмқҙлӢӨ. н–Ҙнӣ„ м—°кө¬лЎң мӢӨм ң кұҙм„Өнҳ„мһҘмқҳ м Ғмҡ©мқ„ мң„н•ҙ UWB м•өм»Өмқҳ мөңм Ғ л°°м№ҳм—җ лҢҖн•ң м—°кө¬мҷҖ IMU м„јм„ңлҘј нҷңмҡ©н•ң мқёкіөм§ҖлҠҘ кё°л°ҳмқҳ мһ‘м—…мһҗ н–үлҸҷ 분м„қмқ„ 진н–үн• мҳҲм •мқҙлӢӨ.




